Guida pratica all'analisi modale
Paolo Rugarli
Queste informazioni non possono essere divulgate, fotocopiate o diffuse presso terze parti senza il consenso dell'Autore.
Il lavoro qui presentato in forma iniziale è stato poi ampliato ed è divenuto un libro di spiegazioni sugli elementi finiti.
Il testo è:
Paolo Rugarli
Analisi Modale Ragionata
EPC libri, ROMA, 2005
Esso include una versione limitata di Sargon fino a 50 nodi
Indice
1) Introduzione
2) Brevi richiami
3) L' aspetto modellistico
3.1) Modellazione delle masse
3.2) Modellazione delle rigidezze
3.3) Modellazione degli smorzamenti
4) L' aspetto matematico: subspace iteration e parametri di controllo
4.1) Numero dei modi
4.2) Ordine del sottospazio
4.3) Massimo numero di iterazioni
4.2) Tolleranza
5) Analisi della risposta: periodi, masse partecipanti, forme modali
6) Analisi strutturale attraverso l'analisi modale
7) Le verifiche strutturali
8) Riferimenti
1) Introduzione
Questa non è la ripetizione delle formule sulla analisi modale, con notazione diversa ed eventuale riproposizione. Questa è una guida rapida ed essenziale su alcuni degli aspetti fondamentali che occorre aver ben chiari allorchè ci si trovi a fare una analisi modale.
Il punto di partenza è che occorre capire cosa si sta facendo, altrimenti si produrrà una delle infinite analisi modali possibili, senza avvicinarsi ai risultati corretti. Una analisi modale coinvolge varie discipline, per cui non tutti hanno il background necessario ad affrontarla.
Per fare una analisi modale occorre un modello agli elementi finiti, con le conseguenti matrici delle masse e delle rigidezze (nel caso di smorzamento alla Rayleigh v' é anche la matrice degli smorzamenti). Le informazioni necessarie al troglodita (il computer) per montare le matrici in questione le forniamo noi. Pertanto attenti agli atteggiamenti fideistici: ogni cosa va decisa e controllata. Per la macchina produrre spazzatura o l' analisi giusta è la stessa cosa. Per ogni programma correttamente funzionante ogni analisi che non porti ad un errore è corretta. Per noi non dovrebbe essere così.
L' analisi modale ha interesse sia nel campo dell' analisi sismica, sia nell' ambito della fondazione di macchine, sia in generale come strumento ulteriore di test sulla bontà di un modello analizzato in campo statico. Come vedremo essa é in grado, se ben condotta, di scovare le zone cedevoli e le quasi labilitá, e pertanto va considerata una analisi che ènecessario saper fare se ci si vuole occupare di ingegneria strutturale.
2) Brevi richiami
Adotteremo la seguente terminologia:
M matrice delle masse
K matrice delle rigidezze
C matrice degli smorzamenti
x(t) vettore degli spostamenti
p coordinata principale
Ψ autovettore (forma modale)
T periodo (in secondi)
ω pulsazione (rad/sec)
ν smorzamento relativo al critico
n ordine del problema
m numero dei modi richiesti
g fattore di partecipazione modale
M massa totale
Per gli indici:
i, j indice di modo o di grado di libertá o di iterazione
x,y,z indice di direzione rispetto agli assi di riferimento globali
Con queste posizioni il problema delle oscillazioni libere di un sistema privo di smorzamento diviene
![]()
ed esso ammette come é noto soluzioni del tipo:
x(t)= p(t)
ove in generale
p(t) = A sin(ωt+φ)
I vettori e le pulsazioni si trovano in corrispondenza al problema agli autovalori
(K- ω2M) Ψ=0
Se le matrici delle masse e di rigidezza sono nonsingolari, di soluzioni ce ne sono n. In caso contrario, detto r il rango di M, di soluzioni ce ne sono r. Di fatto, tranne casi particolari, la matrice delle rigidezze é sempre nonsingolare (il che vuol dire che non ci sono moti rigidi). La matrice delle masse invece puó essere spesso singolare, a causa del fatto che i momenti di inerzia rotazionali sono correntemente trascurati (cfr. ove si parla di modellazione delle masse). Se ad esempio si studia una mensola con un solo elemento finito, avendo in tutto sei gradi di libertá, non ci si aspetti di trovare sei modi se esistono solo le tre masse traslazionali del nodo libero. Né in genere le masse dei nodi vincolati vengono assemblate. In un caso del genere potremo ottenere al piú tre modi. Se ne vogliamo di piú, e se vogliamo una soluzione attendibile, dovremo modellare la mensola con piú nodi, e quindi piú elementi finiti e gradi di libertá.
Delle formule precedenti é importante capire che la dipendenza dal tempo e quella dalla posizione sono state disaccoppiate. Nel corso di una oscillazione principale la forma della oscillazione non cambia: cambia solo, in funzione del tempo, l' ampiezza della oscillazione.
Il comportamento dinamico di una struttura viene ricondotto alla somma di un certo numero di oscillazioni elementari, ognuna delle quali avviene secondo il proprio periodo. Inoltre in generale le varie oscillazioni non sono in fase tra loro, il che implica che i massimi vengano raggiunti in istanti diversi. Potete immaginare molti pendoli di lunghezze differenti oscillare in modo caotico seguendo ciascuno la legge di Huygens? Il comportamento complessivo risulta dalla somma di tutti i modi elementari:
x(t)= Σpi(t) Ψi (i=1, n)
L' analisi modale serve a trovare un certo numero m (m <<n) di questi pendoli, ed a sapere tutto di loro. In piú, rispetto al caso elementare dei pendoli, abbiamo che la forma della oscillazione non é nota a priori, é una specie di sorpresa: dall' analisi della forma della oscillazione possiamo infatti capire molte cose.
La vera oscillazione libera del modello (quella della struttura é un'altra cosa ancora) si ottiene imponendo le condizioni iniziali, in modo tale da trovare le ampiezze e le fasi di ciascuna delle oscillazioni. Talvolta si fa effettivamente questo. Piú spesso si fa, per le analisi sismiche, una specie di media pesata di tutte queste oscillazioni, pervenendo ad un risultato in termini di spostamenti e deformazioni che é un oggetto strano, una specie di chimera. Questa procedura si chiama analisi con lo spettro di risposta. Ne parleremo piú avanti.
3) L' aspetto modellistico
In questo paragrafo verrnno brevemente discussi quegli aspetti che vanno tenuti in conto nel preparare un modello per analisi dinamica. Da un punto di vista numerico, il problema é posto una volta poste le matrici M, K e C. Ognuna di queste matrici significa e descrive un aspetto della struttura reale. In nessun caso la struttura reale é il suo modello oppure ha queste matrici. I ragionamenti che faremo pertengono esclusivamente la modellazione nell'ambito di una teoria che è quella della elasticitá lineare. La realtá, sia chiaro, é un'altra cosa. Ancora: a paritá di idealizzazione, di una struttura si possono fare modelli diversissimi (a plate, a beam, con piú o meno gradi di libertá, eccetera).
Noi introduciamo idealizzazioni e semplificazioni praticamente ad ogni pié sospinto, solo che mentre alcune sono plausibili, altre sono un azzardo ed altre ancora pura fantasia. La scelta del tipo di elemento, del numero e della collocazione degli elementi finiti e dei nodi, della dimensione del problema, sono spesso ereditate dall'analisi statica, che é parente stretta dell'analisi modale. Tuttavia, come vedremo, in campo dinamico possono rendersi necessarie talune ulteriori modifiche al modello.
3.1) Modellazione delle masse
La matrice delle masse é una matrice quadrata che in generale é sparsa, simmetrica ed a banda. In molti importanti casi essa é anche diagonale. La matrice delle masse viene costruita automaticamente dai programmi a partire dalle informazioni che noi forniamo. Una delle piú importanti informazioni riguarda il tipo della matrice, se lumped o consistent (chi scrive non ritiene che l'uso di tradurre necessariamente ogni parola inglese sia la cosa migliore. Anzi molte volte é fuorviante. Nella letteratura tecnica i termini lumped e consistent sono usatissimi: prendiamoli come abbiam preso week-end o disk-jokey.). Se la matrice é lumped essa sará diagonale; se é consistent essa sará sparsa ed a banda. È detto inoltre lumping il procedimento in base al quale una matrice consistent viene diagonalizzata.
Da un punto di vista formale, una matrice consistent é piú rigorosa di una matrice lumped: essa infatti é derivata dall'assemblaggio di matrici consistent al livello dello elemento, le quali, a loro volta, vengono ottenute ipotizzando deformate dinamiche coerenti con quelle statiche (tramite le funzioni di forma o shape functions ([1], vol. 2 pag. 316). Tuttavia, studi numerici hanno mostrato che tali vantaggi vengono talvolta perduti dai maggiori problemi presenti a causa della maggior complessitá numerica del problema da risolvere. In generale si puó dire che con elementi trave, biella e con elementi bidimensionali con tre o quattro nodi, l'approccio lumped è tanto affidabile quanto quello consistent. Anzi, in taluni casi emergerebbe l'opportunitá di usare un approccio lumped, a tutto vantaggio della semplicitá e della rapiditá della soluzione.
Non tutti i solutori consentono di scegliere tra l'approccio lumped e quello consistent: quando nulla vien detto si deve ritenere che l'approccio sia lumped (esso é infati anche il primo ad essersi presentato, storicamente, ed é comunque il piú semplice). A meno che nel modello non siano presenti elementi a sei od a otto nodi, o addirittura di ordine superiore, l'approccio lumped dovrebbe essere considerato del tutto soddisfacente.
Le differenze tra l' approccio lumped e quello consistent riguardano esclusivamente il modo in cui viene simulata numericamente la densitá di peso del materiale. Tali approcci non riguardano il modo in cui vengono simulate le masse concentrate.
Oltre alla densitá di peso del materiale (che puó simulare "spalmandoli" opportunamente anche carichi portati ), é spesso necessario simulare la presenza di masse dovute a macchinari o ad altri diversi dispositivi o sistemi costruttivi. Ció si fa aggiungendo delle masse ai nodi che interessano, secondo criteri diversi: le masse possono essere attribuite secondo il metodo delle aree di influenza, oppure possono essere consegnate in corrispondenza a ben determinati punti di attacco. In entrambi i casi occorre definire, per ogni nodo di interesse, un insieme di sei numeri: tre masse traslazionali e tre masse rotazionali (momenti di inerzia). Questi ultimi sono generalmente nulli, a meno che si simuli un macchinario o un amminnicolo con una rilevante estensione geometrica e/o una massa rilevante. È responsabilitá dell'analista stabilire se una certa massa rotazionale possa o meno essere trascurata. In assenza di momenti di inerzia rilevanti e concentrati le masse rotazionali sono generalmente nulle. In particolare, nella schematizzazione di ordinari edifici civili le masse rotazionali vengono spesso omesse: é infatti la componente traslazionale ad imporre movimenti dell' edificio nel suo complesso, che, tramite le rotazioni dei nodi e le traslazioni, generano momenti flettenti. Non si deve quindi ritenere che l' assenza di momenti di inerzia porti a non avere rotazioni nei nodi o momenti flettenti.
Il fatto che vi siano masse rotazionali nulle porta una corrispondente diminuzione nel rango della matrice delle masse, cosicché essa é in genere sempre singolare. Questo fatto porta ad una riduzione nel numero dei modi che si possono estrarre pari al corrispondente numero di masse rotazionali. Se, ad esempio, si studia una trave doppiamente incastrata con tre elementi finiti, vi saranno due nodi liberi e pertanto 12 gradi di libertá. I modi che si possono estrarre sono peró solo la metá: 6. Se si vogliono estrarre tutti i modi occorre definire anche tutti i momenti di inerzia. Normalmente ció non si fa, ed é facile vedere che giá con pochi elementi si converge ai valori della teoria tecnica della trave.
Ancorché banale merita un cenno il problema delle unitá di misura: é infatti molto facile commettere errori se non si fanno frequentemente analisi modali. Certi programmi poi, consentono l' introduzione di masse in unitá forza, certi altri no. In generale la massa si ottiene dividendo la forza peso ad essa associata per l' accelerazione di gravitá. In certi casi peró g é fittiziamente pari ad 1, e ció puó indurre in errore.
Dopo aver descritto per linee generali il fatto che la massa viene aggiunta ai nodi indirettamente come densitá di peso, e direttamente come massa applicata, siamo in grado di approfondire la questione seguente: quanta massa?
Il problema é davvero fondamentale, perché influenza direttamente tutti i successivi risultati. In generale si puó dire che tanto maggiore é la massa tanto piú alti sono i periodi, ovvero la struttura oscilla piú lentamente. Ció é intuitivo, ma si puó anche ricordare facilmente facendo mente locale alla formula dell' oscillatore semplice (ω2= k/m). Altrettanto generale é la circostanza che vede aumentare le forze apparenti all'aumentare della massa: é molto piú difficile giocare alla fionda con una palla di cannone che con una biglia. Ovvero anche: per far cambiare direzione di moto ad una massa elevata sono necessarie forze di richiamo elastico maggiori di quelle necessarie per far cambiar direzione di moto ad una massa trascurabile. La comprensione di questo semplice meccanismo é basilare, anche se molto spesso capita di vedere persone perdersi nella nebbia di proposizioni astruse anziché riflettere sul principio di D' Alembert.
Quando si analizzano strutture che possono accogliere carichi variabili nel tempo e dovuti alle masse (gravitá, forze centrifughe), é quindi necessario decidere quanta massa applicare al modello: la massa massima, quella minima, una media tra le due, un valore a sentimento, cosa? In certi casi le norme fissano dei valori (tipicamente per gli edifici), in altri no. Questa decisione é una delle tante lasciate libere all' analista, il quale puó, entro certi limiti, ampliare o ridurre la massa applicata sul suo modello. Inutile negare che questo margine di incertezza puó essere usato in una direzione o nell' altra, a seconda delle opportunitá (ridurre o aumentare quel che interessa). Tuttavia, un'analisi condotta seriamente dovrebbe stabilire il range di variabilitá nel quale ci si trova, e stabilire un estremo superiore ed uno inferiore per le grandezze che interessano. Non ha comunque senso dare a tutti i piani di un edificio per una analisi sismica la massa che competerebbe loro per folla compatta, a meno che l' edificio non sia una palazzo congressi. Se infatti l' analista puó dirsi " deve accadere un terremoto proprio quando le sale sono tutte piene" puó anche dirsi " se avviene un terremoto in questa zona tra le 8 e le 19, le mie sale congressi saranno piene o saranno vuote?". In molti casi é la legge che impone, in altri occorre comunque avere senso critico. Una biblioteca sará ragionevolmente sempre piena di libri, ad esempio. Occorre anche pensare alla possibilitá che la situazione muti nel tempo, per cui magari una palazzina venga adibita a scuola, e cosí via.
Si noti che a priori nelle analisi sismiche non é possibile dire che effetto avrá l' aggiunta di una massa su una sollecitazione o uno spostamento: vi sono infatti fattori, come il coefficiente di risposta, che beneficiano di un aumento del periodo di oscillazione. Molto spesso comunque ad un aumento della massa corrispondono maggiori spostamenti e maggiori sollecitazioni.
Molto importante e negletta é la ricerca degli errori. Non bisogna fidarsi dei dati di input sinché un buon numero di diversi fattori non testimonia a favore. Per esempio, se trovo un periodo di 100 secondi come primo modo di un edificio, é molto probabile (certo) che abbia sbagliato qualcosa nelle unitá di misura delle masse, o che vi sia un cedevolezza concentrata o, in somma, che ci sia un errore. Se poi il modello deriva da un modello usato per le analisi statiche, ed in quella sede non c'erano anomalie, allora é certo che l' errore é stato fatto nella discretizzazione delle masse. Quando gli errori sono grossolani é facile avvedersene. Piú difficile accorgersi di aver dimenticato una massa o le masse di un piano, per esempio. Le masse applicate al modello dovrebbero pertanto sempre essere confrontate con quelle che si sarebbe voluto mettere. Infatti, nessuno puó dire a priori che é sbagliato un periodo di 1.23 secondi che sarebbe dovuto essere 1.47 perché non sono state messe le masse su un piano. Per errori clamorosi ma con conseguenze scarse negli indicatori principali noi siamo vulnerabili: attenzione.
Preziosi per la ricerca degli errori sono pertanto quei programmi che dicono quanta massa é applicata zona per zona su una struttura, e che riportano le masse partecipanti. Sottolineo, per concludere, che occorre sempre sottoporre il proprio modello ad un vero e proprio terzo grado per convincersi della sua affidabilità.
3.2) Modellazione delle rigidezze
Sebbene la modellazione delle rigidezze sia in comune con le analisi statiche, spesso il modello strutturale adatto per l'analisi modale è diverso da quello adatto per l'analisi statica. Ciò è dovuto al fatto che in una analisi modale ha spesso interesse l'analisi del comportamento delle strutture principali, e non di quelle secondarie.
In una analisi modale viene chiesto un numero di modi generalmente molto inferiore all'ordine del problema. Questi modi non devono essere sprecati. Non ha quindi alcun senso modellare zone secondarie della struttura (figg. 1 e 2), che, per la loro particolare cedevolezza, tendono a comportarsi in modo disaccoppiato rispetto alle parti principali. Talvolta capita di vedere modelli nei quali i modi richiesti coinvolgono solo parti estremamente limitate della struttura, quelle più cedevoli, mentre l'intero insieme delle strutture principali resta immobile.
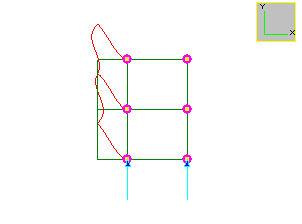
Figura 1: il terrazzo oscilla da solo.
La percentuale di massa partecipante su questo modo è molto bassa
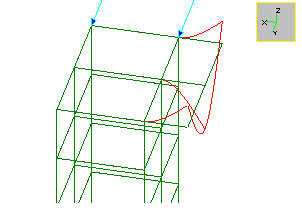
Figura 2: il terrazzo oscilla da solo.
La percentuale di massa partecipante su questo modo è molto bassa
Per capire se un modo è realmente significativo si può vedere la deformata modale e, in associazione, la percentuale di massa partecipante. In tutti i casi in cui la massa partecipante è percentualmente scarsa occorrerebbe agire con cautela. Non si può escludere a priori che modi siffatti siano significativi per la struttura (si pensi ad un sistema tale per cui tutta la massa è concentrata in pochi punti), tuttavia ciò è improbabile.
Molti fanno modelli strutturali come se dipingessero, aggiungono cioè una serie di dettagli che aumentano il realismo del modello e che al tempo stesso, a loro insaputa, ne minano la attendibilità: un modello strutturale non è un quadro, chi lo fa non sta dipingendo. Questo approccio artistico alla modellazione agli elementi finiti è piuttosto diffuso, ed è un indice indiretto di scarsa padronanza del Metodo degli Elementi Finiti. Putroppo ci sono analisi modali eseguite senza alcun controllo su modelli pittoreschi, con massa partecipante scarsissima, di scarsissima attendibilità, che vengono consegnati come se niente fosse all'ignaro committente (che anzi apprezza i dettagli).
Per evitare i problemi suddetti talvolta è necessario escudere o vincolare parti della struttura, al fine di poter avere analisi significative. L'altra alternativa è quella di aumentare il numero dei modi richiesti, il che comporta un aggravio dei costi e, in generale, può non essere una soluzione. A priori non è infatti possibile dire quale sarà il primo modo davvero significativo. L'esclusione di una parte secondaria si può ottenere anche ritoccando localmente il materiale, in modo da irrigidire la sottostruttura. Questo ultimo è un trucco da usare con molta cautela, solo quando indispensabile: ci sono casi, ad esempio, in cui una parte è trascurabile per l'analisi modale ma fondamentale per l'analisi statica. Se si vogliono combinare gli effetti statici e quelli dinamici, inoltre, il modello deve essere proprio lo stesso.
In altre circostanze il fatto che l'analisi modale produca deformate modali che coinvolgono solo parti limitate della struttura è un fatto inatteso, imprevisto ed imprevedibile. In questi casi questa informazione è un importante indizio di un possibile errore di modellazione, oppure di una debolezza della struttura, di un modo di attivarla particolarmente pervio ovvero di un'importante valvola di sfogo (come nei filtri interposti tra struttura e terreno) o, al limite, di un fatto irrilevante: a seconda dei casi. Nella dinamica degli edifici là dove ci sono forti disaccoppiamenti essi sono sempre da guardare con attenzione e sospetto (edifici a pilotis, colonne a baionetta come in fig. 3, corpi di fabbrica nè congiunti nè disgiunti, e così via).

Figura 3: la brusca variazione di rigidezza delle colonne produce un disaccoppiamento pericoloso
Supponendo che il modello strutturale sia adeguato allo scopo, vale la pena di osservare che la discretizzazione non influisce solo sull'ordine della matrice di rigidezza, bensì anche sulla rigidezza nel suo complesso. Si può infatti dimostrare che il Metodo tende alla soluzione esatta con modelli più rigidi della struttura reale (ovvero della reale idealizzazione matematica della struttura reale). Volendo fare un'analisi accurata sarebbe pertanto opportuno eseguire un test di sensitività alla discretizzazione, per esempio suddividendo tutti gli elementi in due o più sotto-elementi.
3.3) Modellazione degli smorzamenti
Il problema degli smorzamenti è uno dei più ostici della dinamica delle strutture, non tanto per la difficoltà matematica, quanto per la aleatorietà della sua corretta valutazione.
Lo smorzamento può riguardare le strutture stesse o l'interazione suolo-struttura. In alcuni casi esso può derivare da circostanze del tutto specifiche (smorzamento indotto da opportuni dispositivi).
Lo smorzamento strutturale riguarda gli elementi ed è compreso tra il 3% ed il 10% dello smorzamento critico, dipendentemente dal materiale, dai sistemi costruttivi e da altri fattori. Esso viene normalmente tenuto in conto con lo smorzamento alla Rayleigh, vale a dire esprimendo la matrice C nel seguente modo:
C = αM + βK
dove α e β sono due scalari.
Lo smorzamento alla Rayleigh ha il pregio fondamentale di consentire il disaccoppiamento delle equazioni del moto, ovvero di consentire l'analisi modale. Se lo smorzamento non è alla Rayleigh non è infatti in generale possibile eseguire un'analisi modale. In questo caso l'integrazione delle equazioni del moto deve essere fatta con gli ordinari metodi di risoluzione dei sistemi di equazioni differenziali, con un evidente aggravio di tempi e di costi.
Lo smorzamento alla Rayleigh gestito dai programmi di calcolo è pressochè sempre del tipo qui descritto, anche se lo smorzamento alla Rayleigh può essere più generale (si veda ad esempio il Clough [2]). Per definire lo smorzamento qui descritto occorre specificare i due parametri α e β. Come determinarli?
Ad ogni modo corrisponde una equazione differenziale che può essere scritta così:
ap'' + (αa + βb)p' + bp = 0
Dall'equazione precedente posta in forma canonica risulta:
2ων α + βω2
Dati m modi si possono scrivere m di tali equazioni. Per avere un sistema determinato (le incognite sono α e β) occorre imporre lo smorzamento relativo al critico di due soli modi. I due modi vengono scelti in modo da essere significativi: in genere si scelgono i modi con maggiore massa partecipante. Sugli altri modi lo smorzamento sarà quello derivante dagli α e β così calcolati. È pertanto della massima importanza fare in modo che la curva ν (ω) definita fissando α e β non dia luogo ad assurdi, per esempio imponendo smorzamenti elevatissimi su modi significativi. Ognuno dei modi impiegati nella analisi deve avere uno smorzamento ν accettabile tenuto conto della sua massa partecpante e del suo periodo.
Lo smorzamento alla Rayleigh viene impiegato allorchè si è interessati alle equazioni del moto senza voler risolvere il sistema di equazioni differenziali. Nelle analisi a spettro di risposta è bene chiarire che lo smorzamento alla Rayleigh non viene utilizzato. In tali analisi lo smorzamento è associato allo spettro stesso.
4) L' aspetto matematico: subspace iteration e parametri di controllo
Per aspetto matematico dell'analisi modale si intende qui l'esame dell'insieme di tutti quei parametri e di quegli indicatori che servono a tenere sotto controllo la soluzione numerica del problema. La soluzione di un problema agli autovalori di grande dimensione avviene per mezzo di metodi iterativi che richiedono una serie di delicate decisioni. I numerossissimi studi sull'argomento hanno consentito di fissare dei valori di riferimento per questi parametri, ma questi valori di riferimento possono non andare bene in certi casi. È pertanto della massima importanza capire esattamente il loro significato per potersi regolare nei casi in cui i valori di default debbano essere cambiati.
Tra le procedure numeriche impiegate per risolvere il problema agli autovalori che ci è di fronte con le caratteristiche ad esso proprie, due tecniche si sono in particolar modo affermate: il metodo subspace iteration e il metodo di Lanczos.
Il metodo più universalmente diffuso è la subspace iteration (iterazione nel sottospazio). Per sottospazio si intende uno spazio di dimensione ridotta rispetto alla dimensione dello spazio di partenza. La dimensione dello spazio di partenza è pari a n, mentre la dimensione del sottospazio è scelta dall'utente, in generale in funzione del numero dei modi richiesti. Subspace iteration funziona nel modo che segue.
1) Siano M e K le matrici delle masse e delle rigidezze di ordine n, ed r l'ordine del sottospazio (cfr. più oltre). Occorre seguire i seguenti passi.
2) Prendere una matrice (n,r) di vettori di tentativo R
3) Formare le matrici (r, r)
M* = TT M T
K* = TT K T
dopo aver calcolato
T = R / K
4) Risolvere il problema agli autovalori (di ordine r)
K* V = M* V Ω
5) Formare la stima degli autovettori
Ψ= TV
6) Controllare la convergenza, e se non si è raggiunto il valore desiderato
7) Formare una nuova matrice
R = M Ψ
e tornare al punto 3).
Nel seguito verrà illustrato il significato dei parametri impiegati nel pilotare una subspace iteration ad uno ad uno, per mostrare l'impiego che se ne debba fare.
4.1) Numero dei modi
La prima cosa che occorre decidere è quale sia il numero dei modi che servono. In generale si può affermare che il numero dei modi che servono è quello che consente di avere nelle tre direzioni una massa partecipante eguale almeno ad una percentuale rilevante di quella totale. Per percentuale rilevante intendiamo l'80% o più. Come sempre deroghe e casi particolari sono ipotizzabili.
Se la struttura è stata ben modellata ed è abbastanza regolare m può essere compreso tra 6 e 10. Nel caso in cui l'oscillazione di massa in una direzione non interessi se ne terrà conto nel valutare la bontà di una analisi.
Se la struttura è complessa il numero dato precedentemente può crescere, anche se non è da attendersi che superi qualche decina. Se una struttura richiede moltissimi modi per per raggiungere l'80% di massa partecipante si possono fare le seguenti ipotesi:
1) La struttura è stata modellata scorrettamente
2) La struttura deve essere analizzata con una analisi step by step.
Il numero dei modi richiesto non deve essere esorbitante. Su problemi di qualche migliaia di gradi di libertà, che sono ormai problemi del tutto ordinari, chiedere cento o più modi porterebbe ad un considerevole onere di calcolo, tale da rendere competitiva l'analisi passo-passo. In genere comunque strutture ben progettate e ben modellate si accontentano di 10 o 20 modi, raramente di più.
Se la percentuale di massa partecipante è già molto elevata non ha alcun senso il tentare di massimizzarla. Essa tende asintoticamente al 100% al crescere del numero dei modi richiesti, ma tale percentuale viene raggiunta solo quando il numero dei modi richiesti coincide con il numero dei modi possibili (pari al rango della matrice delle masse nei casi pratici). Chiedere 1000 modi è un atto generalmente insensato.
4.2) Ordine del sottospazio
Per ordine del sottospazio si intende il numero dei vettori che vengono impiegati per far convergere la soluzione a quella esatta. Secondo Clough [2] l'ordine del sottospazio deve essere pari a r, ove
r = min(2m, m+8)
Molti codici usano questa stessa regola per fissare r una volta che l'utente ha scelto m. Altri codici usano invece la regola seguente:
r = 3m
In ogni caso l'utente può sempre scegliere l'ordine del sottospazio facendo a meno di queste regole e fissandolo direttamente. Si noti che, ovviamente, r non può mai essere superiore al rango della matrice delle masse.
Ciò detto, quali regole occorre seguire per fissare l'ordine del sottospazio, e che cosa influenza?
L'ordine del sottospazio influisce sulla RAM necessaria, e sull'occupazione di hard disk aumentandole.
Aumentando r cresce il numero di operazioni da compiere per ogni iterazione, ed in modo non lineare.
Al tempo stesso, aumentare l'ordine del sottospazio porta ad una maggior rapidità di convergenza, per cui il numero delle iterazioni necessarie per ottenere il raggiungimento della convergenza stessa può diminuire sensibilmente.
L'occupazione su disco e di RAM dipende dalle strategie di soluzione impiegate dai vari solutori, e non è quindi possibile fornire formule esatte. Al tempo stesso non è possibile dire a priori quale sarà il beneficio di un ordine di sottospazio più grande.
Quel che si può dire è che se si osserva una convergenza lenta (più di dieci o dodici iterazioni) e ci si avvicina alla ventina di iterazioni, un successivo run dovrebbe essere eseguito con un ordine di sottospazio maggiore. Si noti che la precisione che si ottiene sugli autovettori cresce considerevolmente aumentando l'ordine del sottospazio, anche se ciò non comporta sensibili variazioni nella tolleranza raggiunta (cfr. tolleranza). Se la convergenza è troppo lenta, o addirittura non la si raggiunge, aumentare l'ordine del sottospazio può risolvere il problema.
4.3) Massimo numero di iterazioni
Generalmente il massimo numero di iterazioni è fissato pari a 20. È illusorio credere di poter ottenere la convergenza semplicemente aumentando a dismisura questo numero. Allorchè il numero di iterazioni necessario per la convergenza è prossimo al massimo conviene, nei run successivi, aumentare l'ordine del sottospazio.
Nel caso particolare in cui venga raggiunto il numero massimo di iterazioni senza che si sia raggiunta la convergenza i programmi generalmente stampano un messaggio di warning. La precisione ottenuta è infatti minore di quella richiesta.
4.4) Tolleranza
Questo numero esprime la variazione relativa della pulsazione da una iterazione a quella successiva. Precisamente, se i è l'indice di iterazione
TOL = (ωi+1 + ωi) / ωi
Generalmente la tolleranza viene fissata pari a 0.00001, ma in alcuni programmi, soprattutto al fine di migliorare gli autovettori, è ancora più piccola (0.00000001 ad esempio).
Per facilitare la convergenza si può aumentare TOL, ma tale operazione può riverberarsi sulla precisione degli autovettori. Tolleranze al di sotto di 0.001 devono essere guardate con sospetto.
[il lavoro di stesura è in progress]