Paolo Rugarli
Il lavoro qui presentato in forma iniziale è stato poi ampliato ed è divenuto un libro di spiegazioni sugli elementi finiti.
Il testo è:
Paolo Rugarli
Calcolo Strutturale con gli Elementi Finiti
EPC libri, ROMA, 2003
Esso include una versione limitata di Sargon fino a 50 nodi
SPLINE
Introduzione al Metodo degli Elementi Finiti
applicato alla ingegneria strutturale
INDICE
CAPITOLO 1
INTRODUZIONE AL METODO
1.1 Introduzione
1.2 Una similitudine
1.3 Le tappe fondamentali
1.3.1 Scelta del modello matematico
1.3.2 Scelta del tipo di elemento finito
1.3.3. Meshing
1.3.4 Attribuzione delle proprietà
1.3.5 Attribuzione dei vincoli.
1.3.6 Descrizione dei carichi
1.3.7 Rinumerazione dei nodi e formazione dei vettori.
1.3.8 Assemblaggio
1.3.9 Soluzione
1.3.10 Stress recovery
1.3.11 Output. e interpretazione dei risultati.
CAPITOLO 2
GLI ELEMENTI.
2.1 Introduzione
2.2 Biella
2.2.1 Lineamenti generali
2.2.2 C-bielle ed S-bielle
2.2.3 Labilita' connesse all'uso improprio delle bielle
2.3 Trave
2.3.1 Lineamenti generali
2.3.2 Elemento trave e trave reale
2.3.3 Trave o biella ?
2.3.4 Il problema dell'orientazione degli assi locali
2.3.5 Le sconnessioni ortogonali
2.3.6 Le sconnessioni oblique
2.3.7 Il fattore di taglio
2.3.8 Eccentricita'
2.3.9 Carichi "distribuiti"
2.4 Molla
2.4.1 Lineamenti generali
2.4.2 Molle non a terra
2.5 Membrana
2.5.1 Lineamenti generali
2.5.1 Le membrane nella modellazione di edifici
2.5.2 Labilita' connesse all'uso improprio delle membrane
2.6 Piastra-Guscio
2.6.1 Lineamenti generali
2.7 Elementi solidi
2.7.1 Lineamenti generali
2.8 Stati piani di sforzo e deformazione
2.8.1 Lineamenti generali
2.9 Elementi speciali
2.9.1 MPC
2.9.2 Elementi su suolo elastico
CAPITOLO 3
I VINCOLI.
3.1 Formulazioni e maschere di vincolo
3.2 Vincoli fissi
3.3 Vincoli obliqui: come modellarli
3.4 Vincoli cedevoli
3.4.1 Cedimenti vincolari
3.4.2 Interazione suolo-struttura
CAPITOLO 4
LE AZIONI.
4.1 Classificazione
4.1 Forze o coppie nodali
4.2 Carichi distribuiti sugli elementi
4.3 Carichi a regione
4.4 Coazioni
4.5 Sisma
4.6 Azioni applicate e reazioni vincolari
4.7 Il concetto di "caso di carico"
CAPITOLO 5
PROBLEMI DI MODELLAZIONE E DI MESHING.
5.1 Raffinatezza della discretizzazione
5.2 Modelli piani o tridimensionali ?
5.3 Nodi doppi
5.4 Elementi doppi
5.5 Riconoscimento di labilita'
5.6 Violazioni della congruenza
CAPITOLO 6
SOLUZIONE NUMERICA DI PROBLEMI STATICI
6.1 Caratteristiche numeriche del problema
6.1.1 Occupazione su disco fisso
6.1.2 Ottimizzazione di banda o di profilo
6.2 Accuratezza della soluzione: come valutarla?
CAPITOLO 7
L'ANALISI MODALE
7.1 Introduzione all'analisi modale
7.2 Le masse
7.2.1 Approccio lumped e consistent
7.2.2 Quanta massa?
7.3 Lo smorzamento
7.4 Bonta' della soluzione: massa partecipante
7.5 Il problema della sovrapposizione dei modi.
7.6 Analisi passo-passo
CAPITOLO 8
L'ANALISI DI BUCKLING
8.1 Introduzione all'analisi di buckling
CAPITOLO 9
LE VERIFICHE STRUTTURALI
9.1 Verificatori e solutori
9.2 Programmatori e Normatori
9.3 Il ritorno dell'arbitrio.
APPENDICE 1
RICHIAMI DI TEORIA DELL'ELASTICITA'
APPENDICE 2
DIZIONARIO MINIMO
| 1. | Introduzione al Metodo |
| 1.1. | Introduzione |
Negli anni '80 si è assistito ad una progressiva diffusione del Metodo degli Elementi Finiti o brevemente, Metodo, tra i professionisti e le imprese (società di engineering e imprese di costruzioni). Si può dire che la diffusione dei programmi agli elementi finiti sia cominciata già negli anni '70 mediante il celeberrimo SAP (Structural Analisys Program). Tuttavia, la difficoltà d'uso e la scarsa disponibilità di mezzi di calcolo al di fuori delle strutture universitarie, fecero sì che la diffusione del Metodo fosse abbastanza limitata.
Va detto peraltro che anche la domanda di analisi agli elementi finiti era limitata: le norme non chiedevano calcoli di quel genere, e la committenza non esigeva - se non in casi molto particolari - relazioni di calcolo contenenti elaborati complessi. Era il tempo dei prontuari della più varia specie, di quelle opere, in auge sin dal secolo scorso, aventi l'obiettivo di campionare i casi più frequenti per offrire una rapida guida all'ingegnere non più freschissimo sul principio dei lavori virtuali, e giustamente privo della voglia di risolvere a mano un sistemino di cinque o dieci incognite.
La progressiva diffusione del Metodo ha comportato una evoluzione delle normative, che oggi richiedono calcoli sempre più sofisticati e sempre meno affrontabili a mano; una maggior domanda di risultati generali e comprensibili in forma sintetica (mappe a colori, deformate, diagrammi di azioni interne ecc.); la rapida obsolescenza degli strumenti redatti in forma tabellare, divenuti presto più difficili da usare e meno generali del Metodo, implementato su un buon programma dotato di interfaccia grafica.
Diverso è invece il discorso da fare allorquando il Metodo venga impiegato per mezzo di programmi difficili da usare (poco user friendly): in tal caso per trar vantaggio dal Metodo si richiede una professionalità specifica, assai poco diffusa. Ciò sia perchè per la diffusione non v'è stato tempo (molti professionisti non hanno potuto seguire corsi universitari sull'argomento), sia perchè la gestione di un programma agli elementi finiti può rappresentare soltanto una parte del lavoro da svolgere: si pensi a quei professionisti che fanno i calcoli ma anche tante altre cose, e non hanno quindi il tempo per dedicarsi completamente all'apprendimento del metodo e del programma di calcolo in loro possesso che ne consente l'impiego.
| 1.2. | Una similitudine |
Alla base dell'astrologia v'è la convinzione di poter prevedere e interpretare i destini di un individuo (o di un gruppo di individui), sulla base del moto relativo di un certo insieme di corpi astronomici come le stelle, i pianeti, ecc.. L'intero insieme dei piccoli e grandi fatti della vita sarebbe governato dal moto di una ventina di pianeti, nello spazio.
L'idea è antichissima e durevole: ancora oggi le riviste ammanniscono previsioni, ed una sorta di professionisti dell'interpretazione, gli astrologi, incassano lauti profitti.
Non è affar nostro entrare nel merito, se non quanto basta per dire che tra il Metodo degli elementi finiti e l'astrologia vi è un punto di contatto: anche il Metodo pretende di conoscere nel dettaglio una situazione complessa -quanto avviene all'interno di un pezzo di struttura (un singolo elemento finito)-, e ciò sulla base del moto relativo di pochi punti appartenenti al pezzo stesso. I punti si chiamano nodi, e la predizione avviene -non diversamente che per l'astrologia- sulla base di un arbitrio: l'ipotesi che gli spostamenti di tutti i punti interni all'elemento finito seguano una certa legge matematica (ad esempio che gli spostamenti varino linearmente o parabolicamente). Chiameremo brevemente e confidenzialmente tale assunzione principio astrologico.
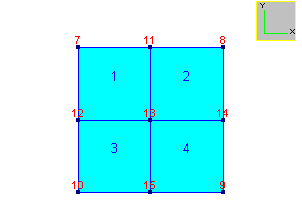
Quattro elementi piastra con i loro nodi
A differenza dell'astrologia il Metodo serve per risolvere un sistema di equazioni differenziali di forma conosciuta, ed è quindi possibile valutarne l'efficienza o -se si preferisce- l'esattezza. Così facendo si può vedere che il metodo funziona. O per meglio dire: si può dimostrare che all'aumentare del numero di elementi (che diventano sempre più piccoli), la soluzione approssimata converge alla soluzione esatta.
Come mai, pur partendo da un arbitrio il metodo funziona ?
La risposta, come vederemo, va cercata nel fatto che gli elementi finiti possono essere resi piccoli quanto si vuole, in modo tale che la risposta "esatta" sia sufficientemente assimilabile, all'interno dell'elemento, al campo di spostamenti la cui forma è stata arbitrariamente ipotizzata. È un pò come rendere un'immagine complessa per mezzo di tanti pixel rettangolari colorati disposti su un reticolo: se i pixel sono sufficientemente numerosi l'immagine verrà ben risolta, sino a far completamente dimenticare il modo in cui è stata ottenuta. Se invece i punti sono insufficienti, l'immagine risulta visibilmente "seghettata", ed è chiaro il modo con il quale è stata ottenuta.
Questo tipo di approccio ricorda molto da vicino l'interpolazione, con in più il vantaggio di poter scegliere i punti ove campionare la funzione incognita. Come vedremo questi punti prendono il nome di nodi, e la loro collocazione sulla struttura è effettivamente decisa da noi.
Nel descrivere come il Metodo funzioni e cosa occorre tenere presente per far funzionare un programma di calcolo, procederemo per approssimazioni successive, approfondendo via via i concetti esposti.
Innanzitutto occorre chiarire quali siano le caratteristiche generali del problema che intendiamo risolvere: noi tratteremo problemi di elasticità lineare in ambito statico. Supporremo inoltre valida l'ipotesi di piccoli spostamenti, che ci consente di scrivere le equazioni di equilibrio rispetto alla configurazione indeformata (in molti casi ciò non è possibile: si pensi ad un cavo teso sotto l'azione del suo peso). In un capitolo a parte verrà trattata, come estensione, anche l'analisi modale e a spettro di risposta.
In questi termini il problema si pone così: dato un corpo od un insieme di corpi variamente vincolati, soggetti ad un insieme di azioni applicate quasi staticamente, e realizzati con materiali soddisfacenti la teoria dell'elasticità linare, supponendo che gli spostamenti del sistema siano talmente piccoli da consentire di scrivere le equazioni di equilibrio rispetto alla configurazione indeformata, qual'è la risposta del sistema all'applicazione delle azioni, in termini di spostamenti, sforzi e deformazioni?
Complementare rispetto al precedente, e non meno importante è il quesito successivo, di cui ci occuperemo in un capitolo ad hoc: la struttura è in grado oppure no di sopportare gli spostamenti, gli sforzi e le deformazioni conseguenti all'applicazione delle azioni?
Una prima domanda sorge spontanea: cosa bisogna fare per descrivere correttamente il problema da risolvere? Quali sono poi i successivi passi da compiere per risolvere il problema?
Sintetizzando in modo brutale possiamo dire così.
Il Metodo consiste nel dividere in pezzi la struttura, postulando contestualmente di saper descrivere mediante regole semplificate gli spostamenti gli sforzi e le deformazioni all'interno di ciascun pezzo (che diventa così un elemento finito). Per poter essere applicate, tali regole richiedono esclusivamente la conoscenza degli spostamenti di pochi punti appartenenti all'elemento (i nodi). I carichi applicati alla struttura vengono poi trasformati in forze e coppie agenti sui nodi. Ciò fatto s'impone l'equilibrio di tutti i nodi della struttura.
Tenuto conto che:
1) le forze esterne applicate ai nodi sono equilibrate dalle reazioni degli elementi sui nodi;
2) le reazioni di ogni elemento sui propri nodi dipendono dallo spostamento relativo dei nodi stessi dell'elemento: esse sono valutate sulla base delle regole semplificate tipiche dell'elemento finito in esame (principio astrologico);
tenuto conto di ciò, per soddisfare l'equilibrio di tutti nodi è necessario risolvere un sistema che ha come termine noto il vettore delle forze e coppie applicate ai nodi (p), e come vettore incognito l'insieme delle traslazioni e delle rotazioni dei nodi (u). La matrice dei coefficienti di questo sistema (K) prende il nome di matrice di rigidezza globale.
Ku = p
Risolto il sistema, e noti quindi gli spostamenti dei nodi di ogni elemento, sulla base delle regole semplificate tipiche dell'elemento in esame è noto quanto avviene all'interno dell'elemento stesso, e ciò in termini di spostamenti, deformazioni e sforzi. Non resta che memorizzare questi risultati su file opportuni, per tutti gli elementi di cui è composta la struttura.
In quanto precede è fondamentale capire il fatto che spostando un nodo qualsiasi si comunicano delle (re)azioni anche a nodi molto distanti, purchè questi siano uniti al nodo-origine tramite degli elementi. Immaginate di essere sull'ultimo vagone di un treno: vi sarà capitato di essere brutalmente sballottati verso il vostro incolpevole vicino in modo del tutto insospettabile. In effetti sull'ultimo vagone si sono scaricate le reazioni di tutti i vagoni precedenti, reazioni dovute al fatto che il locomotore, cento metri più avanti, si è mosso.
Ciò che è stato qui detto in brutale sintesi richiede di essere approfondito. Per farlo esaminiamo uno per uno i passi necessari per arrivare dall'inizio alla fine.
| 1.3. | Le principali tappe |
Volendo descrivere per sommi capi quanto avviene in un normale programma ad elementi finiti, torna utile fare le seguenti due ipotesi:
a) il problema sia descrivibile mediante un unico insieme di equazioni (sia cioè un problema di piastra, di lastra, un problema solido, ecc.);
b) si usi un unico tipo di elemento finito.
Vedremo nel seguito come questo schema possa essere generalizzato per trattare i casi in cui le due ipotesi precedenti non sono valide.
Ciò detto le tappe fondamentali sono:
1) Scelta del modello matematico più adatto per il problema in esame.
2) Scelta del tipo di elemento finito più adatto per il problema in esame.
3) Suddivisione della struttura in elementi finiti (meshing).
4) Attribuzione delle caratteristiche di geometria e di materiale agli elementi finiti.
5) Attribuzione dei vincoli.
6) Descrizione dei carichi per ogni caso di carico.
7) Rinumerazione dei nodi e formazione dei vettori.
8) Assemblaggio
9) Soluzione
10) Stress recovery
11) Output. e interpretazione dei risultati.
Ciascuna di queste tappe è fondamentale ed ineludibile: le tappe in grassetto sono compiute dall'analista, le altre sono invece eseguite automaticamente dal computer. La tappa 3) è in corsivo per ricordare che, oggi, è in parte compiuta in modo automatico dai programmi, seguendo comunque regole stabilite dall'analista.
La necessità di far compiere all'analista i passi 1)-6) e 11) rende il Metodo ancora poco diffuso e poco dominato. Infatti, in ognuna di tali fasi è possibile introdurre errori che si traducono in output inaffidabili o nell'impossibilità di risolvere il problema.
Per meglio comprendere analizziamo in dettaglio ognuno dei passi, riservandoci di approfondire ulteriormente in seguito i principi generali qui esposti.
| 1.3.1. | Scelta del modello matematico |
Ogni problema di elasticità è a rigore un problema tridimensionale, e le equazioni che si applicano sono quelle generali della teoria dell'elasticità. Tuttavia, in moltissimi casi il problema si pone in modo tale da consentire l'uso di una delle numerose trattazioni approssimate o particolarizzate descritte in teoria, consentendo numerose semplificazioni. Possiamo elencare brevemente le teorie che vengono più frequentemente impiegate:
- teoria tecnica della trave;
- stato piano di sforzo;
- stato piano di deformazione;
- assialsimmetria;
- teoria della piastra sottile (Germaine-Kirchhoff);
- teoria della piastra spessa (Mindlin-Reissner).
La scelta di una delle formulazioni precedenti porta inevitabilmente con sè delle approssimazioni, che è compito dell'analista valutare correttamente. Ad esempio, un piastrone di fondazione potrà forse trovarsi in una situazione molto vicina a quella di piastra sottile, mentre difficilmente ciò sarà vero per un plinto di fondazione. Saper dominare gli effetti di una scelta di formulazione rientra nei compiti del bravo analista.
Gli errori dovuti ad una formulazione inadatta restano immutati al variare della discretizzazione, e, in generale, dipendono debolmente dal tipo di elemento finito prescelto. Per quanti elementi si siano usati nel suddividere il plinto, se l'elemento piastra non è quello adatto la risposta calcolata sarà solo pallidamente vicina a qella "esatta".
Il motivo per cui non si usano sempre gli elementi più generali, ovvero gli elementi che suddividono il solido in piccoli solidi (elementi brick), è duplice: per un verso ciò dipende dalla maggior quantità di calcoli che si dovrebbe fare e dal maggior volume di dati che si dovrebbero trattare; per un altro verso ciò dipende dal fatto che la risposta si presenterebbe naturalmente più complicata, anche allorchè della risposta fosse interessante la parte coerente e organizzata: si pensi ad una capriata, nessuno farebbe un modello tridimensionale per valutare le azioni assiali.
Sebbene quanto detto possa sembrare scontato, si tenga presente che molti errori di modellazione derivano da un uso improprio delle formulazioni precedentemente elencate. Al quesito "bisogna usare una lastra o una piastra?" non tutti gli utenti degli elementi finiti sanno immediatamente dare una risposta.
In Appendice II il lettore meno esperto troverà un riepilogo delle formulazioni precedentemente elencate, con qualche utile osservazione a riguardo. Nel prosieguo daremo per scontato che le differenze tra le varie formulazioni siano chiare.
| 1.3.2. | Scelta del tipo di elemento finito |
Una volta fissato l'inquadramento teorico del problema, e pertanto le equazioni che si intende risolvere, è necessario scegliere il tipo di elemento finito con il quale eseguire l'analisi.
I programmi più diffusi lasciano poca libertà nella scelta degli elementi finiti: essi normalmente propongono uno o al più due tipi di elemento, e l'utente deve scegliere. Programmi più evoluti (ma anche più costosi e più difficili da usare) lasciano invece una piena libertà di scelta all'interno di una varietà ampia di possibilità.
Per la teoria tecnica della trave la scelta va o sull'elemento biella (truss), che della trave modella il solo comportamento assiale, o sul più generale elemento trave (beam), con sei componenti di sollecitazione. Sebbene questi elementi siano ben diversi e di uso abbastanza intuitivo, si constata che tra i professionisti non esperti che devono usare il metodo v'è una certa confusione. Più avanti verrà chiarito l'insieme delle differenze tra questi due elementi. Per ora occorre solo rilevare che - in modo affine alla scelta della formulazione-, la scelta di un elemento finito sbagliato o inadatto porta a conseguenze irreparabili: il modello può essere labile o, peggio, intere parti della risposta possono perdersi, facendo calcolare una risposta assai discosta da quella esatta. Estremizzando si pensi, ad esempio, ad una trave Vierendeel schematizzata con le briglie fatte da elementi trave, e le aste di parete modellate con elementi biella: l'intero tipico regime di sollecitazione di una trave siffatta andrebbe perso.
La scelta del corretto elemento finito riguarda anche i problemi piani o quelli di piastra. In quest'ultimo caso, in particolare, la presenza di numerosi tipi di elemento rende il compito particolarmente delicato. Per gli stati piani la scelta è spesso tra elementi a tre nodi (constant strain) ed elementi a quattro nodi (linear strain).
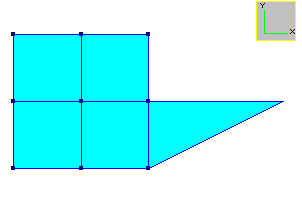
Elementi quadrangolari a 4 nodi e triangolare a 3 nodi
In un problema reale si possono usare tipi diversi di elemento per zone diverse del modello. Anzi, il bravo analista sfrutta tale possibilità a proprio piacimento, al fine di ottimizzare la modellazione. In questa prima descrizione generale del Metodo supporremo invece, per semplicità, che la struttura sia modellata usando un solo tipo di elemento finito.
| 1.3.3. | Meshing |
Una volta scelta la formulazione ed il tipo di elemento finito, è necessario dividere la struttura in parti o elementi finiti. La suddivisione (o con termine inglese diffusissimo la mesh) non può essere fatta a caso ma deve seguire un certo insieme di regole.
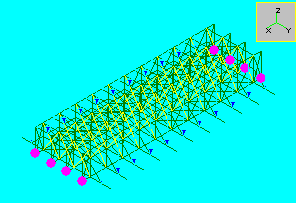
La mesh della copertura del Casinò di Campione (progetto di massima)
La prima regola dipende dal fatto che i singoli elementi finiti devono avere una forma compatibile con il loro tipo. Per esempio, usando ordinari elementi trave non è possibile schematizzare un arco usando elementi curvi: gli elementi devono essere di forma rettilinea. Oltre a non avere una forma diversa da quella possibile, gli elementi finiti non devono essere troppo distorti o presentare, al loro interno, delle singolarità.
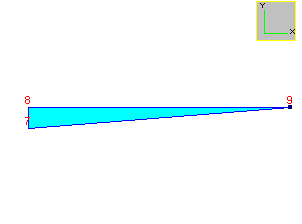
Elemento triangolare eccessivamente distorto
Ad esempio, un elemento triangolare con angoli pari a 89.5 89.5 e 1 grado è inefficiente perchè troppo distorto.
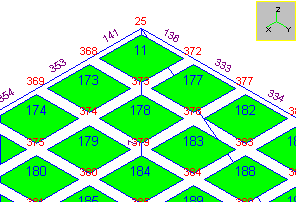
Numerazione di nodi ed elementi
Ogni nodo esistente in un modello viene individuato dal numero progressivo ad esso attribuito. L'insieme dei nodi esistenti in un modello e delle loro coordinate rispetto al sistema di riferimento assunto prende il nome di tabella delle coordinate.
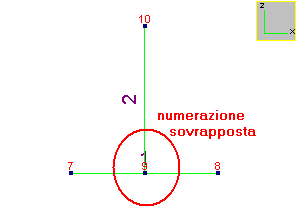
Non possono esistere due nodi con lo stesso numero progressivo.
Possono esistere due nodi diversi nello stesso punto dello spazio, in tal caso si parla di nodi doppi.
Gli elementi finiti possono essere monodimensionali, bidimensionali o tridimensionali. Certi elementi finiti sono puntiformi (0 dimensionali), ma di questi per ora non parleremo.
Ogni elemento monodimensionale è definito da un certo numero di nodi e da un tipo. Noto il tipo è noto come connettere i nodi in modo da descrivere la geometria dell’elemento. Gli elementi rettilinei (i più usati) hanno un asse definito da due nodi. La forma dell’elemento è pertanto definita da due nodi.
Gli elementi bidimensionali (come le piastre o le membrane), sono definiti da un certo numero di lati. Su ogni lato, oltre ai due estremi, è definito un certo numero di punti notevoli, che prendono il nome di nodi. A ben vedere, noto il tipo di elemento e noti i nodi del lato, questo è univocamente definito, pertanto noto il tipo dell'elemento, la sua geometria è univocamente definita dai suoi nodi.
Gli elementi tridimensionali sono definiti da un certo numero di facce, delimitate da lati, definiti da nodi. Ogni faccia ha in comune con un'altra faccia un lato, definito da due o più nodi. Noto il tipo di elemento i lati definiscono univocamente ogni faccia, e quindi, in definitiva, si può dire che la forma di ogni elemento di cui sia noto il tipo è univocamente determinata una volta noti i nodi dell'elemento.
Pertanto in generale dato un tipo di elemento (trave, biella, CST, ecc.) la sua forma è univocamente definita dai suoi nodi e dal loro ordinamento.
La tabella che per ogni elemento di un certo tipo specifica quali siano ordinatamente i suoi nodi, prende il nome di tabella delle incidenze.
Due elementi si dicono connessi se hanno in comune almeno un nodo. La connessione però può essere incompleta o mal realizzata, in certi casi.
Esempio di connessione errata tra elementi: i lati sono parzialmente connessi
Un lato di un elemento piano o tridimensionale si dice connesso con il lato di un altro elemento piano o tridimensionale dello stesso tipo, se tutti i nodi del lato del primo elemento sono gli stessi nodidel lato del secondo elemento. Se solo una parte dei nodi è identica il lato si dirà parzialmente connesso o, equivalentemente, parzialmente sconnesso. Se due lati non hanno in comune alcun nodo essi si diranno sconnessi.
Una faccia di un elemento tridimensionale si dice connessa con la faccia di un altro elemento tridimensionale, se tutti i nodi della faccia del primo elemento sono gli stessi nodi della faccia del secondo elemento. Se solo una parte dei nodi è identica la faccia si dirà parzialmente connessa o, equivalentemente, parzialmente sconnessa. Se due facce non hanno in comune alcun nodo esse si diranno sconnesse.
Per quanto detto precedentemente, elementi che abbiano lati con numero di nodi differente possono essere solo parzialmente connessi, e, allo stesso modo, elementi che abbiano facce con numero di nodi differente possono essere solo parzialmente connessi.
Se due elementi sono parzialmente connessi essi, generalmente, violano la congruenza. Le connessioni parziali vanno pertanto evitate, a meno che non si vogliano simulare fessure, giunti di costruzione o, in generale, situazioni nelle quali vi sono delle discontinuità.
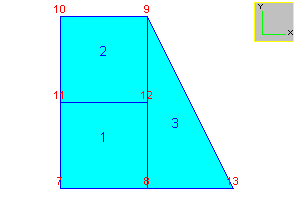
Elementi affacciati. Si noti che in assenza della numerazione degli elementi è impossibile capire se gli elementi siano o meno connessi.
Quando un nodo di un elemento giace sul contorno di un altro elemento senza avere con esso in quel punto una connessione i due elementi si dicono semplicemente affacciati. Gli elementi semplicemente affacciati non sono connessi, e pertanto violano la congruenza.
Da quanto si è brevemente visto una mesh non è un disegno, bensì un insieme di relazioni tra nodi ed elementi soddisfacenti requisiti di congruenza.
La suddivisione della struttura in elementi finiti è uno dei punti più delicati dell'intero procedimento, in quanto oltre a soddisfare tutti i requisiti di regolarità che una mesh deve soddisfare, gli elementi devono essere sufficientemente piccoli là dove il gradiente degli spostamenti o degli sforzi è maggiore (ciò è un pò come diminuire i tempi di apertura dell'otturatore per fotografare soggetti in rapido movimento).
A priori non è possibile dire con certezza se una mesh sia sufficientemente fitta oppure no. Per decidere se la discretizzazione sia sufficiente si usa spesso costruire una nuova mesh, che contenga tutti i nodi della mesh originaria più un insieme di nuovi nodi, in modo da confrontare i risultati ottenuti con le due mesh: quella più rada e quella più fitta. Se la variazione dei risultati è ovunque modesta si può ritenere di aver ottenuto risultati accettabili, viceversa è necessaria una terza mesh, più fitta della seconda, e così via sino ad ottenere la precisione cercata (rimeshing). Attualmente, alcuni programmi sono in grado di eseguire il rimeshing in modo completamente automatico, in quanto memorizzano la geometria del problema sotto forma di primitive grafiche, non solo sotto forma di nodi ed elementi (solid modeling). Diversamente il rimeshing richiede un lento lavoro di rimodellazione.
La suddivisione della struttura in elementi ha comunque come risultato un insieme di nodi con la tabella delle coordinate, ed un insieme di elementi con la tabella delle incidenze. Queste due tabelle, scritte in vario modo costituiscono la maggior parte del file di input di un qualunque programma agli elementi finiti.
| 1.3.4. | Attribuzione delle proprietà |
Una volta definita la forma degli elementi finiti occorre stabilire le caratteristiche di geometria e di materiale di ogni singolo elemento. Per "caratteristiche di geometria" si intende il fatto che per alcuni elementi finiti (la maggior parte), non basta specificare la forma per sapere con precisione quale sia la parte di materia che l'elemento simula. In molti casi occorre fornire dei dati aggiuntivi, come lo spessore degli elementi piastra-guscio o membrana, le aree o i momenti di inerzia per gli elementi trave, e così via. Si noti che nello specificare tali caratteristiche occorre non tanto simulare la realtà fisica, quanto tarare correttamente il comportamento di un elemento. Ad esempio, per una piastra dotata di irrigidimenti, lo spessore, che pure occorre fornire se si usa un elemento piastra, ha solo un valore numerico: non è il vero spessore delle piastra reale, che non è definito. Anche per questo motivo l'input dei dati relativi a spessori, momenti di inerzia, aree di taglio non è sempre agevole.
Un secondo elemento di difficoltà è legato alla possibilità di fare errori (anche solo di calcolo o di battitura). I programmi più recenti sono dotati di archivi che consentono di attribuire le caratteristiche degli elementi richiamandole da file opportuni. I programmi degli anni '70, invece, richiedendo di scrivere un file formattato di input possono creare qualche problema.
Oltre alle caratteristiche geometriche vanno attribuite le caratteristiche di materiale. In generale infatti, ogni elemento finito potrebbe avere un proprio materiale. Più spesso vi sono gruppi di elementi con materiale affine, i quali simulano parti diverse della struttura (si pensi, ad esempio, ad una struttura mista acciaio-calcestruzzo). Per questo motivo, generalmente, le caratteristiche di materiale sono definite per un gruppo di elementi di tipo affine. La definizione del materiale nell'ambito del Metodo, e dei programmi di calcolo che usano il Metodo, non è, come si potrebbe credere, simile alla definizione teorica del materiale (isotropo anisotropo, ortotropo con tutte le costanti del caso): essa ha un senso convenzionale, dovuto al fatto che per definizione certi elementi finiti hanno senso per particolari tipi di materiale, del quale comunque utilizzano pochi parametri, non tutti. Ad esempio, un elemento biella utilizza il solo modulo di elasticità di Young relativo alla direzione definita dall'asse della biella. In questo caso l'eventuale anisotropia del materiale non rileva, in quanto del materiale interessa il solo comportamento lungo l'asse della biella stessa. Inoltre, non occorre specificare nè il coefficiente di Poisson nè il modulo di elasticità tangenziale, che non entrano nella formulazione dell'elemento. Può invece essere utile, per valutare il peso dell'elemento o la sua massa, la densità del materiale, che infatti viene generalmente richiesta. Nel caso dell'elemento trave, invece, si fa implicitamente l'ipotesi che il materiale sia omogeneo ed isotropo, e ciò anche se sarebbe piuttosto semplice trattare un elemento con materiale ad esempio ortotropo. Semplicemente, l'elemento è implementato in questo modo.
I programmi in generale non esauriscono l'insieme delle possibili scelte: ne forniscono alcune, spesso le più note o le più utili. Si tenga anche presente che un corretto impiego delle costanti di materiale e di quelle geometriche consente spesso di modellare situazioni apparentemente non modellabili. Ad esempio, nel caso della trave con materiale ortotropo sarebbe sufficiente tarare in modo opportuno i momenti di inerzia per modellare correttamente questa situazione.
Per quanto detto appare evidente che la fase di attribuzione di materiali e geometria agli elementi è una fase molto delicata, che può richiedere sottigliezza o, addirittura veri e propri trucchi, volti ad ottenere modellazioni significative: è pertanto della massima importanza capire bene non solo come funziona ogni singolo elemento finito, ma anche come è stato implementato nel programma di cui si dispone. Qui basterà ripetere che tali caratteristiche non vogliono essere realistiche se non in modo indiretto, consentendoci di tarare il comportamento degli elementi a nostro piacimento. Il loro scopo è modellare, non fotografare. Esse vanno quindi intese più come i pulsanti necessari a teleguidare un aeroplanino che come puntuali riferimenti alla teoria.
| 1.3.5. | Attribuzione dei vincoli |
Definiti completamente gli elementi finiti, occorre specificare quali siano i vincoli a cui è soggetta la struttura. I vincoli nella realtà fisica possono riguardare punti, segmenti o superfici. Nell'ambito del Metodo i vincoli riguardano sempre solamente i nodi. Ciò non significa che le situazioni reali più generali non possano essere modellate: vuol dire semplicemente che per farlo nell'ambito del Metodo occorrerà vincolare un certo numero di nodi. In alcuni casi, come si vedrà meglio nel cap. 3, per modellare compiutamente certe situazioni di vincolo occorre aggiungere elementi oltre a vincolare nodi, tuttavia il concetto di vincolo viene direttamente applicato solo ai nodi.
I vincoli dei nodi possono riguardare uno o più dei possibili movimenti del nodo. In generale un nodo ha sei gradi di libertà, vale a dire sei diverse possibilità di movimento: vincolandolo le sue possibilità di movimento possono scendere a cinque, quattro..., fino ad annullarsi del tutto. I sei gradi di libertà tipici di un nodo sono: le tre traslazioni secondo le direzioni x,y,z del sistema di riferimento globale; le tre rotazioni attorno ad assi diretti come x, y, z. Vincolare una di queste componenti significa porla eguale a zero.
Il numero dei vincoli posti sui nodi della struttura influenza direttamente, come vedremo, la dimensione del problema matematico da risolvere. Se tutti i nodi fossero vincolati non esisterebbe alcun problema da risolvere (e neanche, in generale, sforzi o deformazioni sul modello). Il problema matematico in questione è un sistema di equazioni lineare, avente un numero di incognite pari al numero di gradi di libertà dei nodi, vale a dire la somma di tutti i gradi di libertà di tutti i nodi della struttura. Ogni componente di spostamento vincolata implica, come vedremo, un'equazione in meno.
Se i vincoli sono insufficienti oppure mal posti il problema può diventare irrisolvibile o inutile. Esso diventa irrisolvibile allorchè siano presenti delle labilità, vale a dire delle zone della struttura che si possono muovere senza che insorgano sforzi; diventa invece inutile da risolvere allorchè i vincoli siano stati messi in modo tale da travisare il comportamento strutturale, rendendo il modello inadeguato. Entrambi i casi si verificano -purtroppo- frequentemente. Più temibile appare il secondo, perchè in tal caso si possono ottenere risultati assurdi senza accorgersene.
| 1.3.6. | Descrizione dei carichi |
I carichi o più in generale le azioni presenti su una struttura sono generalmente raggruppate in casi di carico, intendendosi che tutte le azioni associate ad un caso di carico agiscono contemporaneamente. La risposta della struttura sarà dunque, in ossequio al principio di sovrapposizione degli effetti, la somma delle risposte della stessa struttura alle singole azioni. Quanto detto implica che se si vuol tenere distinte le risposte dovute a cause diverse, queste vanno messe in casi di carico differenti.
Le azioni possono essere di vario tipo: esse possono essere forze o coppie applicate direttamente a punti della struttura ove sono presenti nodi (forze nodali), oppure possono essere forze o coppie applicate a punti interni agli elementi finiti, o posti sul loro contorno, comunque in assenza di un corrispondente nodo: si parla in tal caso di carichi distribuiti. Sono altresì distribuiti i carichi di pressione applicati agli elementi (ad esempio un carico uniforme sull'asse di un elemento trave). Un particolare tipo di azione è il carico termico, che può in generale essere nodale o distribuito. Infine, sono azioni anche gli spostamenti imposti (ad esempio i cedimenti vincolari). Spostamenti imposti e carichi termici sono detti coazioni.
Come sarà chiarito in seguito tutte le azioni devono essere tradotte, attraverso un opportuno procedimento, in forze o coppie nodali, ad eccezione degli spostamenti imposti: lo spostamento anzichè essere posto eguale a zero viene posto eguale al valore assegnato.
Ad ogni caso di carico viene fatto corrispondere un vettore delle forze nodali, che riepiloga gli effetti complessivi delle azioni sui nodi (anche se le azioni sono distribuite). Tale vettore è il termine noto del sistema di equazioni che risolve la struttura per quel dato caso di carico, ed a esso corrisponde un vettore soluzione che contiene gli spostamenti di tutti i nodi. Ad ogni caso di carico corrisponde pertanto un vettore soluzione diverso. In generale se sono stati definiti n casi di carico occorre risolvere n sistemi lineari, aventi tutti la stessa matrice dei coefficienti e diversi vettori a termine noto: i vettori delle forze nodali corrispondenti al caso di carico in esame.
| 1.3.7. | Rinumerazione dei nodi e formazione dei vettori |
Una volta creati i casi di carico ed associati ad essi i carichi applicati, il problema può essere risolto. Il primo passo compiuto da ogni buon programma agli elementi finiti è la rinumerazione dei nodi e, in alcuni casi, la rinumerazione degli elementi. Scopo della rinumerazione è pervenire ad un sistema di equazioni identico a quello originario, ma più facile da risolvere perchè la matrice dei coefficienti è dotata di una banda assai minore: si vedrà più in dettaglio nel cap.6 cosa questo significhi.
Lo sforzo in termini di tempo di calcolo necessario per rinumerare è sempre largamente inferiore al vantaggio ottenuto, e ciò benchè in genere la soluzione proposta dal rinumeratore non sia quella ottima (quella che dà la banda minima in senso assoluto).
La rinumerazione (o renumbering) viene effettuata facendo uso di criteri presi dalla teoria dei grafi ed è un passaggio estremamente delicato ed importante. In genere l'utente non può intervenire in alcun modo sulla rinumerazione, e quindi si ha quasi sempre una drastica riduzione dei tempi di calcolo e dell'occupazione su disco.
La rinumerazione richiede un aggiornamento della tabella delle incidenze e delle coordinate: in effetti un nodo che prima della rinumerazione aveva il numero n, dopo la rinumerazione ha invece il numero m, pertanto là dove compare il numero n occorre invece scrivere il numero m.
Dopo aver rinumerato, il generico solutore è in grado di costruire i vettori delle incognite e l'insieme dei vettori termine noto. Per fare ciò viene generalmente costruita una tabella che associa ad ogni equazione del sistema, ovvero ad ogni riga della matrice dei coefficienti, un particolare spostamento di un particolare nodo. Una riga della tabella potrebbe essere la seguente:
NODO |
VECCHIO |
Tx |
Ty |
Tz |
Rx |
Ry |
Rz |
113 |
1280 |
567 |
0 |
568 |
569 |
0 |
570 |
Ciò vorrebbe dire che la riga 568 della matrice dei coefficienti si riferisce alla traslazione x del nodo con numero 113 (che prima della rinumerazione aveva il numero 1280). Il numero 0 in corrispondenza alla traslazione y ed alla rotazione y indicano che non vi sono equazioni associate, poichè i due spostamenti sono impediti dai vincoli. Infine, alla riga 569 e 570 del sistema si trovano le rotazioni del nodo 113 secondo l'asse y e l'asse z. La tabella precedente si chiama spesso "vettore I-D", dal simbolo ID ad essa associato nei sorgenti SAP.
Dopo la rinumerazione, pertanto, è possibile associare in modo biunivoco una riga della matrice dei coefficienti ad una componente di spostamento incognito, ovvero ad un grado di libertà.
I vettori termine noto corrispondono alle forze nodali dovute ai carichi applicati direttamente ai nodi, ed ai carichi distribuiti. Esistono tanti vettori termine noto quanti sono i casi di carico. La parte di forze dovuta ai carichi direttamente applicati ai nodi può venir costruita in questa fase: se più forze insistono sullo stesso grado di libertà nello stesso caso di carico esse vengono sommate (in ossequio al principio di sovrapposizione degli effetti). La parte di forze nodali dovuta ai carichi distribuiti viene invece calcolata e sommata nel corso della fase successiva, vale a dire dell'assemblaggio.
| 1.3.8. | Assemblaggio |
L'assemblaggio è forse la fase del Metodo che richiede il maggior sforzo per essere compresa: in termini rozzamente esemplificativi potremmo dire che l'assemblaggio è il procedimento che crea la matrice dei coefficienti del sistema (matrice di rigidezza globale) e che completa i vettori termine noto della parte dovuta ai carichi distribuiti. In effetti se questo è l'effetto occorre capire perchè si fa questo e non altro. Per illustrare il significato dell'assemblaggio esistono vari approcci: noi faremo uso dell'approccio statico e dell'approggio energetico. Entrambi questi approcci verranno ulteriormente descritti in seguito, qui ci si vuole limitare a dare il senso delle cose, in poche parole.
Nell'approccio statico, l'assemblaggio è il procedimento che computa e somma, nodo per nodo, le forze che provengono al nodo stesso a causa del movimento degli altri nodi ed a causa dei carichi applicati. Le forze arrivano al nodo in esame tramite gli elementi ad esso connessi: le forze dovute agli spostamenti dei nodi connessi si chiamano reazioni; si chiamano invece azioni le forze dovute ai carichi applicati. Il singolo termine Kij della matrice di rigidezza globale è eguale alla forza che occorre esercitare in direzione del grado di libertà i a causa dell'esistenza di un valore unitario di spostamento del grado di libertà j. Se il nodo associato al grado di libertà i tramite il vettore ID appartiene ad elementi che non sono connessi in alcun modo al nodo associato al grado di libertà j, allora Kij = 0. Questo caso è molto frequente, ed infatti la matrice K è in generale ricca di termini nulli (matrice sparsa). La somma di tutte le forze agenti sul grado di libertà i, a causa del movimento dei nodi (ovvero la somma delle reazioni) è data da
![]()
dove la sommatoria è estesa a tutti i gradi di libertà della struttura (j=1, n).
Sia fi la somma delle azioni sul grado di libertà i. Perchè vi sia equilibrio l'azione deve essere eguale e contraria alla reazione, ovvero:
Ri = fi
e quindi occorre risolvere il sistema, che ha per incognite gli n spostamenti ui
![]() (*)
(*)
Nell'approccio energetico l'assemblaggio è sostanzialmente visto come il procedimento che somma i contributi di ciascun elemento all'energia di deformazione elastica, ed al potenziale dei carichi (con il contributo dei carichi distribuiti).
In effetti l'energia di deformazione dell'intera struttura è data dalla somma delle energie di deformazione dei pezzi di cui è composta, e ciò semplicemente in base alla proprietà additiva degli integrali. Ognuno dei contributi Ee all'energia di deformazione totale viene espresso in funzione del vettore degli spostamenti nodali incogniti, nella veste di forma quadratica associata a una matrice quadrata di ordine pari al numero complessivo dei gradi di libertà, ovvero del tipo
![]() (^)
(^)
dove u è il vettore degli spostamenti nodali incogniti, di dimensione n, e il generico elemento e Ke la matrice di rigidezza espansa del singolo elemento finito. Il motivo per cui l'energia di deformazione del singolo elemento finito dipende da una matrice, secondo quanto scritto nell'equazione precedente, verrà chiarito in seguito. Accettata la (^) l'energia di deformazione per l'intera struttura diventa
![]()
![]()
Analogo principio vale per il potenziale dei carichi. Infatti per ogni elemento si può scrivere
![]()
![]()
Impiegando il principio di minimo dell'energia potenziale totale Π, dove
Π = E - P
si vede che tale principio è soddisfatto se è vero che u soddisfa la equazione matriciale (ovvero il sistema di equazioni algebriche)
![]() (*)
(*)
dove K è data proprio dalla somma delle matrici di rigidezza espanse dei singoli elementi.
In qualsiasi modo lo si ottenga, il sistema di equazioni (*) dà il vettore degli spostamenti nodali incogniti, coi quali, in base al principio astrologico è possibile ottenere sforzi e deformazioni all'interno degli elementi.
Ritorneremo più avanti, e più in dettaglio, sull'assemblaggio. Qui basterà dire che il sistema (*), in entrambe le forme in qui è stato scritto, è l'espressione discretizzata di principi fisici ben conosciuti, e che l'assemblaggio costruisce tale sistema in base a regole che dipendono da quei principi.
| 1.3.9. | Soluzione |
Una volta costruita la matrice del sistema e completati i vettori termine noto con l'effetto dei carichi distribuiti, un generico programma di calcolo risolve il sistema, calcolando tanti vettori di n incognite quante sono le condizioni di carico. Ognuno di tali vettori contiene n valori, che rappresentano gli spostamenti dei nodi secondo gli n gradi di libertà della struttura. Al termine della soluzione è pertanto noto di quanto si sia spostato ogni nodo in ogni condizione di carico. Lo spostamento è riferito al sistema di coordinate globale, è perciò uno spostamento assoluto: lo spostamento relativo di due nodi può tuttavia essere facilmente ottenuto a partire dai due spostamenti assoluti.
Della soluzione di sistemi sparsi, simmetrici ed a elevato numero di equazioni parleremo meglio più avanti. Qui basterà dire che la fase di soluzione vera e propria (solving) comporta problemi di occupazione della memoria RAM e di occupazione su disco che sono affrontati in un'ampia varietà di modi dai solutori disponibili sul mercato. Talvolta (spessisimo con certi programmi) la fase di solving è persino più rapida di quella successiva di stress recovery, pertanto un'eccessiva enfasi nel sottolineare la difficoltà del compito sembra oggi spoporzionata: risolvere un sistema di mille o tremila equazioni è oggi quasi lo stesso, e, si può dire, è un problema relativamente poco oneroso.
Se nel corso dell'attribuzione dei vincoli sono stati commessi degli errori, questi si evidenziano, ove ciò sia possibile, proprio nella fase di solving. È questa la situazione in cui "qualcosa non funziona", "il programma dà strani messaggi" e così via. Spesso il non esperto si ritrova fuori dal programma solutore e non sa perchè. Lasciando da perte le digressioni sulla amichevolezza del software, che pure sarebbero molto interessanti, diremo qui che quando questa circostanza si verifica essa è spessisimo dovuta a problemi di labilità. In effetti per evidenziare il problema è necessario assemblare la matrice di rigidezza globale, perchè solo così si può constatare che non è invertibile, e che quindi il sistema non ha soluzione.
Terminata la fase di solving gli spostamenti vengono memorizzati su disco, e puo cominciare la fase successiva: la stress recovery.
| 1.3.10. | Stress recovery |
Con la parola inglese stress recovery si suole intendere il procedimento che porta dagli spostamenti nodali agli sforzi negli elementi. In un certo senso tale procedimento può essere visto come un assemblaggio al contrario, una sorta di disassemblaggio, per dire che si va dai dati generali, propri a tutta la struttura, ai dati propri ai singoli elementi finiti, che vengono a questo punto considerati l'uno indipendentemente dall'altro, come piccoli microcosmi a sè stanti.
Nella stress recovery chi gioca un ruolo decisivo è il principio astrologico: dopo aver risolto il sistema, infatti, sono noti gli spostamenti che decidono cosa avviene all'interno dell'elemento finito: è sufficiente applicare le regole semplificate usando questi spostamenti per sapere, nei limiti dell'approssimazione del Metodo, quali siano gli sforzi le deformazioni e gli spostamenti di tutti i punti appartenenti all'elemento.
Poichè il principio astrologico prevede di conoscere gli spostamenti dei nodi dell'elemento, la prima cosa che occorre fare è estrarre dal vettore che dà gli spostamenti di tutti i nodi della struttura, il vettore, più piccolo, che dà gli spostamenti dei soli nodi dell'elemento. Spesso il principio astrologico usa spostamenti espressi secondo un sistema di riferimento particolare, il sistema di riferimento dell'elemento, o sistema locale: pertanto, una volta costruito il vettore che dà gli spostamenti dei nodi dell'elemento, occorre trasformarlo per avere quegli spostamenti nel sistema locale.
Eseguita la trasformazione non resta che applicare agli spostamenti nodali dell'elemento le regole semplificate ad esso proprie, per conoscere gli sforzi all'interno dell'elemento stesso. In genere gli sforzi vengono calcolati in un numero predefinito di punti all'interno dell'elemento, che possono o meno coincidere con i nodi dell'elemento stesso. Tutti questi sforzi vengono poi memorizzati, elemento per elemento, e costituiscono il risultato della stress recovery, nonchè una buona metà del risultato complessivo cercato. Non ha ovviamente senso cercare di conoscere spostamenti o sforzi al di fuori dell'elemento, usando le regole proprie all'elemento stesso ed i suoi spostamenti nodali in particolare: fareste mai l'oroscopo a Tizio con la posizione dei pianeti di Caio?
| 1.3.11. | Output e interpretazione dei risultati |
La fase di output, svolta automaticamente dal programma, conclude la soluzione di un problema, ma non la fase di analisi del problema, che, anzi, con l'output raggiunge l'inizio della sua parte più interessante.
L' output è dato in genere sotto forma di due insiemi di file: i file ASCII ed i file binari. I risultati, vale a dire gli spostamenti e gli sforzi, possono figurare in entrambi gli insiemi di file, ma generalmente i risultati sui file ASCII sono inservibili. Essi sarebbero inservibili anche se l'output di un'analisi agli elementi finiti fosse effettivamente il risultato cercato, poichè non è umanamente pensabile gestire in modo efficiente migliaia e migliaia di numeri organizzati in giganteschi tabulati, ma, in particolare, essi sono inservibili perchè raramente i risultati di un'analisi agli elementi finiti sono proprio il risultato cercato. Spesso il risultato cercato si può ottenere indirettamente dai risultati di un'analisi agli elementi finiti, che comunque vanno in ogni caso validati.
Nei file ASCII è invece opportuno controllare che non vi siano messaggi di "warning" o altre anomalie che possano far pensare a problemi nel corso della lettura dei dati di input, o dell'assemblaggio, o della soluzione vera e propria. Spesso i file di diagnostica sono piccoli file ASCII perfettamente gestibili.
Resta dunque evidente che i risultati scritti nei file binari sono quelli i più interessanti, e ciò perchè possono agevolmente essere ulteriormente processati, dando loro un'interpretazione grafica e consentendo un accesso immediato ai valori di interesse. Questo punto è oggi ineludibile: è la fase di restituzione grafica dei risultati.
Perfettamente funzionale alla precedente è l'importantissima fase di controllo dei risultati, che ci deve garantire del fatto che la soluzione rispetti le caratteristiche del problema da risolvere. Occorre quindi controllare la spostata, sia in termini qualitativi che in termini quantitativi; controllare le reazioni vincolari, che devono essere equilibrate ai carichi che volevamo mettere; controllare l'andamento e l'intensità degli sforzi misurati, che non devono essere contrari al senso comune: i casi particolari sono sempre sospetti; e così via, controllare tutto ciò che si può. L'errore è sempre in agguato, l'uso di strumenti precisi ed affidabili non implica il loro corretto uso, allo stato attuale dell'arte. Molto spesso l'esito di questi controlli è un ritorna al punto 5, ma talvolta occorre tornare al punto 1: naturalmente più si è acquisita esperienza più ciò accade di rado...
| 2. | Gli elementi |
| 2.1. | Introduzione |
Come si è detto gli elementi finiti sono i mattoni fondamentali in cui suddividiamo la struttura per studiarne il comportamento. Ognuno di questi mattoni segue in generale regole differenti e serve ad uno scopo differente. E’ perciò della massima importanza comprendere bene come ciascun mattone funzioni, al fine di impiegarlo correttamente nelle analisi.
Qui verrà descritto solo un numero minimo di elementi finiti, quelli più largamente impiegati dai programmi in circolazione. Si può dire che gli elementi possano essere catalogati secondo almeno due criteri: il primo criterio è quello della equazione governante, vale a dire, l’insieme di equazioni che l’elemento finito è chiamato a sposare; il secondo criterio è quello della formulazione, vale a dire il criterio adottato per sposare l’equazione governante.
In accordo al primo criterio, e classificando solo le analisi più frequenti, gli elementi si possono dividere secondo la seguente tabella:
EQUAZIONE GOVERNANTE |
ELEMENTO |
Continuo tridimensionale (Navier Stokes) |
Solido |
Piastra sottile (Germaine-Kirchhoff) |
Piastra |
Piastra spessa (Mindlin) |
Piastra |
Stato piani di sforzo |
Piano, Membrana spaziale |
Stato piano di deformazione |
Piano |
Teoria tecnica della trave (Eulero Bernoulli) |
Trave, biella |
Trave su suolo elastico |
Trave |
Trave alla Timoshenko |
Trave |
In accordo al secondo criterio ogni elemento della seconda colonna della tabella precedente può essere ulteriormente classificato, come per esempio nel modo seguente:
ELEMENTO |
FORMULAZIONE 1 |
FORMULAZIONE 2 |
FORMULAZIONE 3 |
................... |
SOLIDO |
tetraedrico a 4 nodi |
brick a 8 nodi |
brick a 20 nodi |
................... |
Nella tabella precedente la quarta colonna è stata lasciata in bianco ad indicare che, stabilita l’equazione governante, vi sono in generale numerosi elementi disponibili, i quali hanno, in generale, vantaggi e svantaggi.
In generale si può dire che gli elementi con maggior numero di nodi sono più precisi, ma rendono più difficile la creazione della mesh, specialmente nelle zone a geometria fortemente variabile. Spesso è necessario usare, all’interno di un unico modello ad elementi finiti, non solo elementi aventi equazioni governanti diverse (travi e piastre), ma anche elementi aventi analoga equazione governante ma formulazione differente (elementi tetraedrici e brick, elementi piani triangolari e quadrangolari, eccetera). Quest’ultima circostanza deriva spesso proprio dalla necessità di sposare la geometria della struttura anche nelle zone fortemente variabili.
Nel seguito verranno illustrati in dettaglio alcuni elementi finiti tra quelli più universalmente impiegati dai vari programmi agli elementi finiti disponibili.
| 2.2. | Biella |
| 2.2.1. | Lineamenti generali |
Per biella intendiamo un elemento finito rettilineo capace di trasmettere solo una azione assiale.
Questo comportamento è legato alla ipotesi che si fa sul campo di spostamenti dei punti del solido schematizzato dall’elemento. Si fanno infatti le seguenti ipotesi:
1) Il solido è un prisma retto ed omogeneo lungo L
2) Tutti i punti del solido si limitano a traslare nella direzione dell’asse del prisma.
3) Tutti i punti di una medesima sezione del prisma traslano allo stesso modo.
Se u(x, y, z), v(x, y, z), w(x, y, z) sono i tre spostamenti di ogni punto del prisma le precedenti ipotesi si scrivono semplicemente:
u(x, y, z) = u(x)
v(x, y, z) = 0 (2.1)
w(x, y, z) = 0
Per le ipotesi cinematiche fatte, l’equazione governante il problema si semplifica notevolmente, e diviene, essendo E il modulo di Young, A l’area del prisma, e px il carico distribuito per unità di lunghezza:
EAu’’(x) + px(x) = 0 (2.2)
Questa è l’equazione che governa il problema della biella. E’ una equazione differenziale del secondo ordine che, nella ipotesi in cui
px(x) = 0 (2.3)
ammette la soluzione generale
u(x) = ax + b (2.4)
In termini pratici possiamo dire che, se le ipotesi (2.1) sono soddisfatte, e se non vi sono carichi applicati, lo spostamento dei punti della biella è lineare e dipende da due soli parametri. Se chiamiamo per definizione
u1 = u(0)
(2.5)
u2 = u(L)
la (2.4) si può scrivere
u(x) = u1 + (u2-u1)x/L (2.6)
L’equazione (2.6) risolve esattamente la (2.2) in assenza di carichi distribuiti. La (2.6) è anche un principio astrologico: se si conoscono le traslazioni delle sezioni iniziale e finale, allora si conoscono gli spostamenti di tutti i punti dell’elemento. Lo sforzo è ottenuto dalla legge di Hooke (=E) esprimendo la deformazione come derivata prima dello spostamento, e, detta N l’azione assiale, essa diviene
N(x) = N = EA(u2-u1)/L (2.7)
L’azione assiale è dunque proporzionale a (u2-u1), la costante di proporzionalità (detta rigidezza) essendo
K= EA/L
ed inoltre non dipende da x, è costante lungo tutto l’asse del prisma.
I risultati che abbiamo ottenuto sono esatti (risolvono esattamente l’equazione 2.2) solo se non vi sono carichi distribuiti. Infatti:
a) Se esistono carichi trasversali all’asse del prisma non sono più accettabili le (2.1) e la (2.2) non modella correttamente il problema
b) Se esistono carichi diretti come l’asse del prisma la (2.4) non è più valida, e con essa la (2.6) e la (2.7).
[il lavoro di stesura è in progress]