Proprietà flessionali elastiche e plastiche
Calcolo automatico di sezioni generiche
Paolo Rugarli
[Costruzioni Metalliche, 4-1998]
Premessa
La ricerca di soluzioni più vantaggiose in termini progettuali ed economici porta sempre più frequentemente all’uso di sezioni di forma non standard. Lo stesso concetto di forma standard tende a perdere il suo significato visto l’arricchimento delle forme disponibili.
I produttori di profilati metallici hanno tradizionalmente diffuso i propri prodotti mettendo a disposizione dei progettisti manualetti più o meno estesi contenenti l’elencazione delle forme disponibili, corredate da un insieme di caratteristiche statiche per lo più eterogenee al variare dei produttori e dei manualetti. Nel frattempo, con il passare degli anni, i manualetti si sono moltiplicati senza che nessuno affrontasse in modo generale e sistematico il problema. Lo sforzo migliore compiuto in Italia in quest’ambito resta la traduzione in italiano del classico testo tedesco “Stahl im Hochbau”1 ([1]), il quale dà un’ampia casistica di forme anche composte, oltre ad una notevole messe di informazioni, purtroppo non più aggiornate.
Il testo [1] rappresenta uno dei vertici raggiunti dall’approccio manualistico classico, solidi tomi da consultare nei casi più disparati, ma è opinione diffusa che sia ormai necessario raccogliere il testimone per proseguire lo sforzo originario alla luce della parlata attuale, la quale usa l’informatica. Questa necessità non deriva dalla voglia di seguire la moda, bensì dalla possibilità di portare a compimento lo sforzo che ha animato chi ha redatto i nostri classici testi di consultazione, vale a dire dare una risposta precisa e rapida ad una amplissima classe di problemi. I progettisti ed i produttori oggi desiderano poter descrivere qualsiasi forma sezionale in modo efficiente e rapido avendo in cambio tutti i dati della sezione descritta. Un particolare interesse riguarda le sezioni ottenute assemblando più sezioni elementari (sezioni composte) e le sezioni formate a freddo, per le quali l’industria ha creato una amplissima gamma di tipi, in continua evoluzione.
Questo lavoro illustra la procedura seguita dall’autore per implementare il calcolo di sezioni in modo del tutto generale, nell’ambito del progetto SAMBA.
Nostro obiettivo è il calcolo delle proprietà flessionali elastiche e plastiche su una sezione o una riunione di sezioni completamente generica. Il lavoro porrà l’accento sugli aspetti numerici e computazionali che caratterizzano la questione, individuando alcuni degli aspetti da affrontare per risolverla.
La sezione potrà essere elementare, composta, formata a freddo e contenere fori: il procedimento si applica in modo generale.
Descrizione a poligonali
Generalità
In questo lavoro una sezione verrà descritta come la riunione di un certo numero m di poligonali chiuse, riferite ad un sistema di coordinate (x, y). Ogni poligonale può rappresentare un pieno o un vuoto. Sinteticamente la sezione Θ è tale per cui
![]() (1)
(1)
dove Pi è la i-esima poligonale ed hi vale +1 se tale poligonale è piena, -1 se tale poligonale è vuota. E’ pacifico che ogni tratto curvilineo può essere approssimato da un certo numero di tratti rettilinei pur di adottare un numero di punti sufficiente.
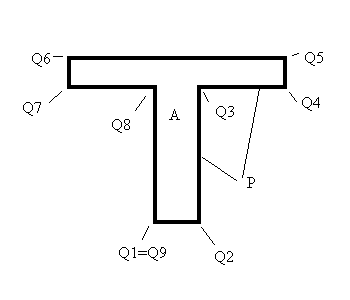
fig. 1
Ogni poligonale Pi viene descritta da n+1 punti del piano ed n lati, essendo il punto Q1 coincidente per definizione con il punto Qn+1.
Affinchè questa descrizione abbia senso è necessario che nessun lato di una poligonale intersechi un altro lato (nè della stessa nè di altre poligonali).
I punti di ciascuna poligonale sono ordinati da Q1 a Qn+1 percorrendo la poligonale in modo antiorario2.
Calcolo di integrali
Siamo interessati al calcolo del seguente integrale, definito sul dominio A interno ad una poligonale P:
![]()
dove p e q sono due interi positivi o nulli. Utilizzando la formula di Green si ha:
![]() (2)
(2)
dove la poligonale P è il contorno di A.
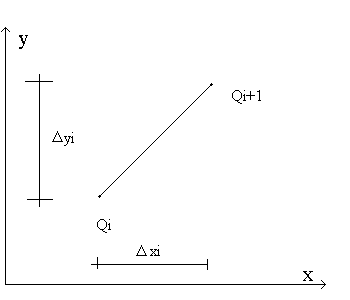
fig. 2
Pertanto
![]() (3)
(3)
Se Qi ha le coordinate xi ed yi e Δxi = xi+1-xi possiamo porre, lungo il tratto Qi, Qi+1:
![]() (4.a)
(4.a)
![]() (4.b)
(4.b)
![]() (5)
(5)
ove λ è un’ascissa adimensionale compresa tra 0 ed 1. Sostituendo le (4)-(5) nelle (2) (3) si ottiene
![]() (6)
(6)
L’integrale definito che compare nella (6) può essere valutato numericamente o in forma chiusa. Per esso introduciamo il simbolo abbreviato (a tre o quattro indici)3
![]() (7)
(7)
dove Qi è il punto di partenza e p e q sono gli esponenti di x ed y, rispettivamente. Grazie alla (7) possiamo scrivere
![]() (8)
(8)
Risultano particolarmente utili alcuni integrali, precisamente:
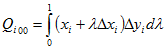 (9.a)
(9.a)
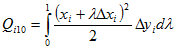 (9.b)
(9.b)
 (9.c)
(9.c)
 (9.d)
(9.d)
 (9.e)
(9.e)
 (9.f)
(9.f)
Tutti questi integrali definiti sono facilmente calcolabili in forma chiusa. Ad esempio:
![]()
![]()
e così via.
Il risultato trovato si presta ad essere generalizzato al caso in cui la sezione segua la (1), sia cioè composta da una riunione di m poligonali piene e vuote. In tal caso l’integrale andrà dal punto Qj della poligonale i al punto Qj+1 della stessa poligonale i, o, più brevemente da Qij a Qij+1. In definitiva, generalizzando la (8) con una scrittura a quattro indici
![]() (10)
(10)
ovvero qualsiasi integrale è ridotto a somme algebriche.
Proprietà flessionali elastiche
Con la notazione introdotta risulta:
![]() (11.a)
(11.a)
![]() (11.b)
(11.b)
![]() (11.c)
(11.c)
![]() (11.d)
(11.d)
![]() (11.e)
(11.e)
![]() (11.f)
(11.f)
Dalle (11) è possibile calcolare il baricentro G e gli assi principali per le vie ordinarie. Sia γ l’angolo formato dall’asse principale u con l’asse x.
La distanza del generico punto Qij (punto j della poligonale i) dall’asse u è
![]()
e dall’asse v è
![]()
Poniamo ora semplicemente
![]() (12.a)
(12.a)
 (12.b)
(12.b)
trovando i moduli di resistenza elastici.
Sezioni composte
Una delle situazioni più frequenti e più interessanti per il progettista in acciaio è costituita dalla possibilità di creare una sezione “composta4” assemblando altre sezioni elementari, in modo da ottenere un certo scopo. In questo ambito non esistono regole a priori che limitino le casistiche possibili, così sembra proprio che ogni elencazione, per quanto completa, sia destinata ad essere insufficiente. Spesso la necessità di assemblare in un certo modo le sezioni elementari deriva da situazioni contingenti o da necessità estetiche che creano una situazione irripetibile. La soluzione del problema consiste nel creare un software in grado di simulare con assoluta libertà (la stessa del progettista) l’assemblaggio delle sezioni elementari. La procedura di calcolo deve pertanto essere specializzata per trattare in modo efficiente il problema.
Chiamiamo dunque sezione composta Φ la riunione di un numero arbitrario f di sezioni elementari Θ. Ogni sezione Θ è riferita ad un proprio SC (x, y) e dotata dei propri assi principali (u,v) formanti un angolo γ col sistema (x,y). Chiamiamo invece (X,Y) il SC adottato per la sezione composta ed (U, V) il suo sistema principale.
La posizione di ogni sezione elementare Θk nel piano è individuata da tre numeri: le coordinate (Xk, Yk) del suo baricentro e l’angolo di rotazione αk dell’asse xk rispetto all’asse X.
Per prima cosa osserviamo che il metodo precedentemente illustrato resta valido, perchè è facile vedere che anche la sezione composta soddisfa la (1), può cioè essere vista come riunione di opportune poligonali. Naturalmente, perchè il metodo sia applicabile è necessario che tutte le poligonali siano riferite al medesimo SC (X,Y), ciò che si fa imponendo a tutte le poligonali i della sezione k, Pki, una rototraslazione dipendente da (Xk, Yk) e αk.
Il software deve aggiornare in tempo reale i dati della sezione composta man mano che chi lo usa trasla e ruota liberamente le sezioni componenti nel piano.
Particolare rilievo assumono i controlli di congruenza di cui si è fatto cenno in precedenza, poichè le sezioni componenti non possono sovrapporsi. E’ pertanto necessario assicurarsi che la scelta corrente di Xk, Yk e αk, ovvero il modo in cui l’utente ha deciso di muovere e ruotare la sezione corrente k nel piano, non violi queste condizioni di regolarità. Ciò si fa controllando che nessuna poligonale della sezione correntemente spostata Pki intersechi le poligonali delle altre sezioni, e che nessuna poligonale di una sezione sia contenuta o contenga un’altra poligonale presa da un’altra sezione. Da un punto di vista pratico il software non deve accettare come definitive situazioni che violino la congruenza, pur consentendo di “transitare” per situazioni inammissibili.
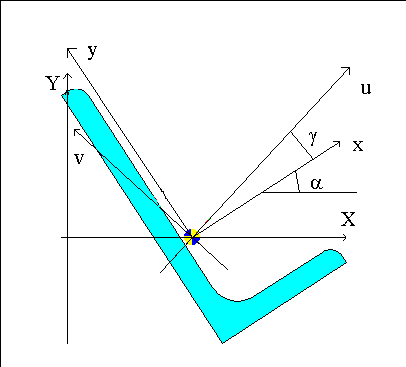
fig. 3
Oltre al metodo generale già descritto è possibile utilizzare il metodo diretto per il calcolo dei momenti di inerzia e degli assi principali della sezione composta a partire dalle analoghe grandezze delle sezioni elementari. Naturalmente nel far ciò occorre considerare oltre alla traslazione anche la rotazione di ciascuna sezione elementare. Le formule che si ottengono sono le seguenti:
![]() (13.a)
(13.a)
![]() (13.b)
(13.b)
![]() (13.c)
(13.c)
![]() (13.d)
(13.d)
![]() (13.e)
(13.e)
![]() (13.f)
(13.f)
Inoltre risulta, ponendo βk=αk+γk
![]() (14.a)
(14.a)
![]() (14.b)
(14.b)
![]() (14.c)
(14.c)
Le (14) esprimono i momenti di inerzia della sezione elementare rispetto agli assi paralleli agli assi (X, Y) e passanti per il baricentro della sezione elementare. Sostituendo le (14) nelle (13) si trovano le proprietà della sezione composta rispetto al suo sistema di riferimento, in funzione delle proprietà principali delle sezioni componenti, delle posizioni (Xk, Yk) delle sezioni componenti e della rotazione αk loro applicata.
Ottenute le quantità (13) con il metodo generale o con quello diretto è poi possibile calcolare il baricentro della sezione composta, i suoi assi principali ed il suo angolo γ (angolo tra X ed U). Per ottenere i momenti di inerzia baricentrici basterà applicare le formule di trasporto ben note. Per il calcolo dei moduli di resistenza sarà comunque necessaria la descrizione a poligonali ed il calcolo delle (12).
Profili formati a freddo: alcune specializzazioni
Definiamo qui “formato a freddo” un profilo che possa essere individuato da una linea media K e da uno spessore costante t. Supponiamo che la linea media sia composta da tratti rettilinei e da archi di circonferenza. Per ragioni di regolarità imponiamo
![]()
ovvero la linea media deve essere continua con la sua derivata prima. In questo caso il calcolo delle proprietà elastiche può essere fatto in forma chiusa. Poniamo
![]() (15)
(15)
ove li è il generico lato, rettilineo o circolare. Scriviamo ora i contributi di ciascun lato, rettilineo o curvilineo, alle grandezze utili al calcolo. Se li è rettilineo, è inclinato di γ sull’asse di riferimento x, ha il baricentro in Gi ed è lungo bi, risulta banalmente
![]() (16.a)
(16.a)
![]() (16.b)
(16.b)
![]() (16.c)
(16.c)
![]() (16.d)
(16.d)
![]() (16.e)
(16.e)
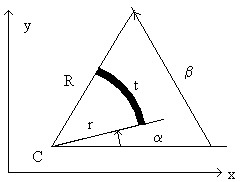
fig. 4
Se li è un arco di circonferenza risulta, ponendo per definizione zk= Rk-rk:
![]() (17.a)
(17.a)
![]() (17.b)
(17.b)
![]() (17.c)
(17.c)
![]() (17.d)
(17.d)
![]() (17.e)
(17.e)
dove xc ed yc sono le coordinate del centro, α e β sono i due angoli in figura, R ed r sono il raggio esterno e quello interno.
Le proprietà della sezione si ottendono sommando i contributi di ciascun lato, per esempio
![]()
dove si usa la (16.c) o la (17.c) a seconda che il lato i sia rettilineo o circolare.
Per il calcolo dei W è comunque necessario trasformare la linea media K di spessore t nella poligonale chiusa equivalente P, cosa che si fa orlando K di uno spessore t/2, e trasformando gli archi di circonferenza in poligonali con un numero opportuno di lati.
Proprietà flessionali plastiche
Generalità
Il calcolo dei moduli di resistenza plastici assume un’importanza crescente dato il maggior impiego di norme agli stati limite (EC3, BS, AISC, ecc.).
Riferiamo la sezione ai suoi assi principali elastici (u, v). Dato un generico asse neutro plastico k (fig. 5) di equazione
au+bv+c=0
ove risulti
![]()
questo divide la sezione in una zona tesa ed in una compressa Ak+ ed Ak-. Nella zona tesa la tensione normale vale +fy, nella zona compressa essa vale –fy. Introduciamo la funzione del punto s(Q) così definita:
s(Q) = sign(au+bv+c) = +1 se Q Ak+
s(Q) = sign(au+bv+c) = -1 se Q Ak-
Ad ogni generico asse neutro plastico k (PNAk) corrispondono un’azione assiale e due momenti flettenti, ovvero
![]() (18.a)
(18.a)
![]() (18.b)
(18.b)
![]() (18.c)
(18.c)
La terna fyΛk = {Nplk, Muplk, Mvplk}T rappresenta un punto del dominio limite (uno e non due perchè si suppone che l’asse sia orientato). Il vettore Λk ha per componenti i moduli plastici realtivi al generico asse neutro k prescelto, precisamente risulta:
![]() (19.a)
(19.a)
![]() (19.b)
(19.b)
![]() (19.c)
(19.c)
Calcolo degli integrali
Sia data una poligonale Pi con dominio interno Ai tagliata da un asse s. Chiameremo Pi’ la poligonale (equivalente a Pi) ottenuta aggiungendo a Pi i punti ottenuti intersecando i lati di Pi con s.
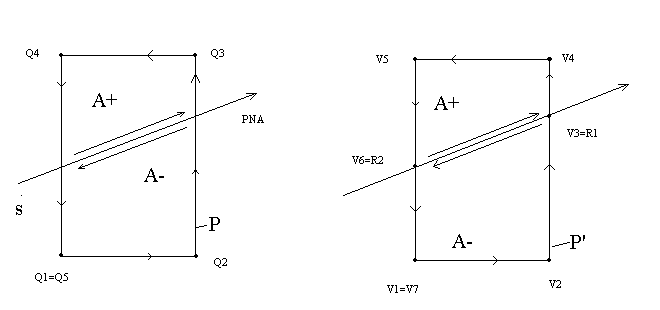
fig. 5
Se inizialmente i punti di Pi sono (n+1), i punti di Pi’ saranno in generale (n+1+r). Gli r nuovi punti trovati stanno tutti su s. Chiamiamo Vij i punti della nuova poligonale Pi’ (j va da 1 a n+1+r), e ordiniamo gli r nuovi punti trovati, Ril, lungo s a partire dal primo verso l’ultimo (in modo che il primo e l’ultimo siano tra loro i più distanti, fig. 6).
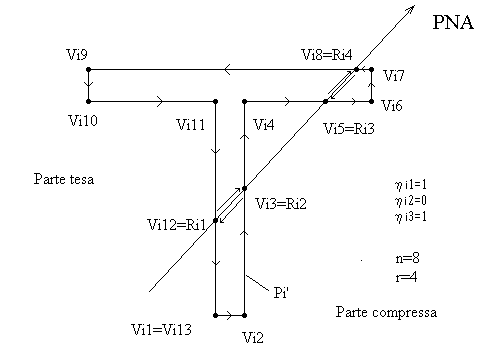
fig. 6
Data una coppia di punti successivi Ril ed Ril+1, posti entrambi sulla poligonale i, ed un asse neutro plastico di equazione au+bv+c=0, introduciamo la funzione ηil(Ril) così definita (fig. 6):
ηil = sign(bΔuil - aΔvil) se il punto medio del segmento RilRil+1 è interno a Pi’
ηil = 0 se il punto medio del segmento RilRil+1 è esterno a Pi’
Questa funzione ηil vale dunque +1 o –1 a seconda che il vettore che va da Ril a Ril+1 sia equiverso o meno con l’orientazione dell’asse neutro plastico, e vale 0 se il tratto RilRil+1 non appartiene al dominio.
La opportunità di introdurre questa funzione è puramente informatica. Di fatto essa tiene in conto due cose: la prima è che non tutti i segmenti giacenti su s fanno effettivamente parte della sezione, e ciò va fatto comprendere al calcolatore (ad esempio il segmento Ri2Ri3 della figura 6). La seconda è che andando da R1 a R2,R3 eccetera, si può percorrere l’asse neutro plastico nel suo verso o in verso ad esso opposto, e di ciò occorre tener conto nel valutare i contributi, che hanno segno + solo se appartengono al contorno della parte tesa, ovvero solo se si percorre la frontiera nel verso di PNA (fig.5).
Si può dimostrare5 che
 (20)
(20)
dove si intende come al solito
![]() (21)
(21)
e similmente per Rilpq.
Per una sezione composta da m poligonali Pi, trasformate in poligonali equivalenti Pi’ (dando luogo ai nuovi punti Ril), possiamo quindi porre, ricordando le (19) ed applicando la (20):
 (22.a)
(22.a)
 (22.b)
(22.b)
 (22.c)
(22.c)
Le (22) dicono come calcolare i moduli limite (e perciò le sollecitazioni limite) dato un certo asse neutro plastico k. Si noti che le quantità hi valgono +1 se la poligonale Pi rappresenta un pieno, -1 se la poligonale Pi rappresenta un vuoto. Analogamente sk(Vij) valgono +1 o –1 a seconda della posizione di Vij rispetto all’asse neutro plastico k (in zona tesa o compressa), e che la quantità il vale 1,-1 o 0. Pertanto le (22) sono la somma con segni opportuni di un certo numero di integrali del tipo (9).
Ricerca dei moduli plastici
Tra tutti i possibili assi neutri plastici k ai quali sono associate le terne Λk, siamo interessati ai due assi PNAu e PNAv tali per cui le terne diventano, rispettivamente
Λu = {0, Zu, 0} (23.a)
Λv = {0, 0, Zv} (23.b)
ovvero a quegli assi neutri plastici che generano distribuzioni di sforzo equilibrate con le sollecitazioni flessionali semplici.
Supponiamo di voler trovare Ζu.Ciò si fa con un procedimento iterativo che tenda ad annullare Ζv ed Npl.
Consideriamo dapprima l’annullamento di Npl.
Dato un generico angolo di inclinazione ϕ dell’asse neutro plastico, e posta l’equazione dell’asse neutro plastico nella forma
vcos(ϕ)-usin(ϕ)-c = 0
è possibile vedere che esiste uno e un solo c=c(ϕ), e perciò un solo asse neutro plastico di inclinazione ϕ, tale per cui la zona tesa sia eguale a quella compressa, ovvero perchè sia vera la condizione
Apl = Ak+ - Ak- =0 (24)
Tale condizione è necessaria affinchè la sezione sia puramente inflessa, ovvero sia annullato Npl.
Per ogni generico ϕ il corrispondente valore di c può essere trovato con un metodo iterativo che usi ad esempio il metodo delle secanti (i è ora l’indice di iterazione):
![]()
L’errore ε viene calcolato come
![]() (25)
(25)
L’iterazione si arresta quando la disequazione (25) è soddisfatta.
Ad ogni variazione di c, che corrisponde ad una traslazione dell’asse neutro plastico a inclinazione costante, occorre valutare i moduli plastici corrispondenti usando le (22).
Consideriamo ora l’annullamento di Zv.
Al valore c ottenuto con un generico ϕ corrispondono terne del tipo
{ 0, Zu(ϕ), Zv(ϕ) }
ovvero terne dove Zv non è nullo. Il problema è trovare il valore di ϕ che annulli Zv, cosa che viene fatta anche qui con un procedimento iterativo. Poniamo (sia sempre i l’indice di iterazione):
![]() (26)
(26)
valutando l’errore come
![]() (27)
(27)
Ad ogni nuovo ϕ viene compiuta un’iterazione completa su c per trovare il valore c che soddisfa la (24). Con la coppia (ϕi, c(ϕi)) si calcolano le (22), si valuta l’errore secondo la (27) e si cerca un nuovo ϕ con la (26). Il procedimento viene arrestato quando la disequazione (27) è soddisfatta.
Conclusione
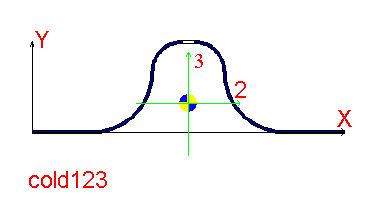
fig. 7
Il procedimento qui illustrato è stato implementato nel programma SAMBA, e con esso sono state valutate le caratteristiche elastiche e plastiche di sezioni composte e formate a freddo complesse, come quelle riportate nelle figure 7 (sezione formata a freddo con foro) ed 8 (sezione composta generica).
La generalità del metodo seguito e la sua impostazione pensata per l’implementazione hanno consentito di risolvere il problema in una amplissima varietà di casi, rispondendo al proposito originario.
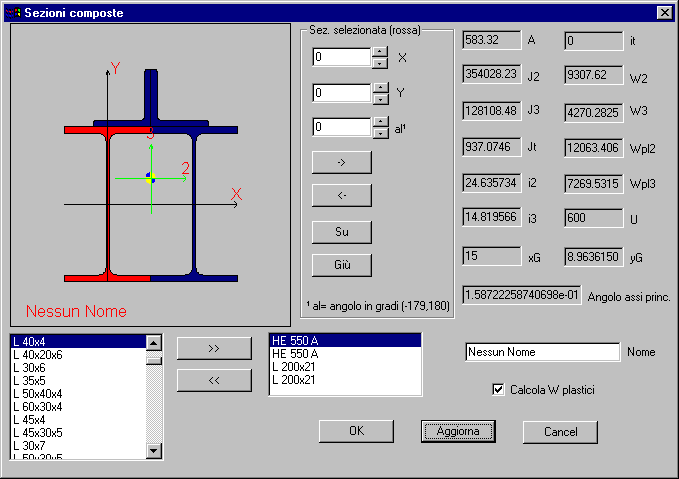
fig.8
Ad esempio lo studio delle sezioni composte avviene per mezzo del dialogo di fig. 8, nel quale si può vedere come le sezioni componenti (rettangolo centrale in basso) vengano aggiunte o rimosse (>>, <<) scegliendole da una lista opportuna (rettangolo a sinistra).
La sezione selezionata (in rosso in figura) può poi essere traslata e ruotata con continuità (controlli “X”, “Y”, “al”) oppure spostata “a scatti” cercando le condizioni di tangenza con le altre sezioni componenti (pulsanti ->, <-, “su”, “giù”).
Le grandezze di calcolo vengono aggiornate con continuità, mentre i moduli plastici possono essere calcolati su richiesta innescando la doppia iterazione descritta (“Calcola W plastici”, in fig. 8).
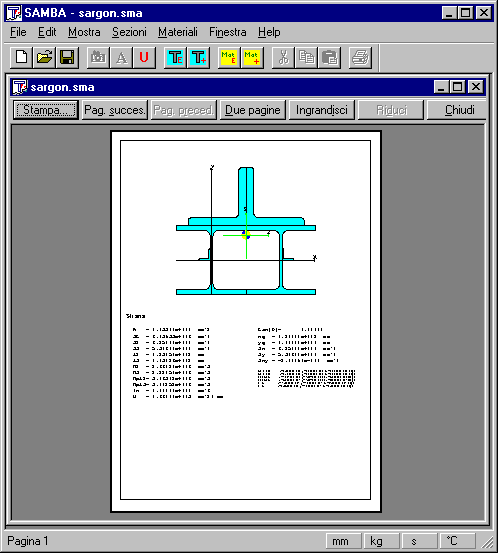
Fig.9
I dati della sezione possono poi essere comodamente stampati su qualsiasi periferica (fig.9).
Legenda
α angolo formato dall’asse x con l’asse X, angolo iniziale di lato circolare
β angolo finale di lato circolare
| γ | angolo formato dall’asse principale u con l’asse x |
Δxi per definizione eguale a xi+1-xi
ε errore di un processo iterativo
| ϕ | angolo di inclinazione di PNA sull’asse u |
ηil funzione dei punti Ril ed Ril+1
| λ | ascissa adimensionale compresa tra 0 ed 1 |
Γ contorno di A
Γ+ contorno di A+
Γ- contorno di A-
Λ vettore contenente i moduli plastici
| Θ | sezione composta da poligonali |
a parametro dell’equazione di PNA
b lunghezza di un lato rettilineo di sezione formata a freddo, parametro dell’equazione di PNA
c parametro dell’equazione di PNA
d distanza di un punto da un asse
f numero di sezioni componenti di una sezione composta
fy tensione di snervamento
h funzione che stabilisce se una poligonale è un pieno o un vuoto
i indice del punto su una poligonale P, indice della poligonale di Θ, indice di iterazione, indice del lato.
j indice del punto sulla poligonale Pi
k indice della sezione componente, indice del generico asse neutro plastico
l lato di sezione formata a freddo, indice
m numero di poligonali di una sezione
n numero di lati di una poligonale
p esponente intero positivo o nullo
q esponente intero positivo o nullo
r raggio interno di lato circolare, numero di (nuovi) punti di P giacenti su s
s retta corrispondente a PNA
s(Q) funzione del punto Q
t spessore di una sezione formata a freddo
zk Rk-rk
A dominio interno a una poligonale, area di una sezione
A+ zona tesa
| A- | zona compressa |
C centro della circonferenza a cui appartiene un lato circolare
G baricentro
H parte comune tra Γ+ e Γ-
I momento di inerzia
M momento flettente
N azione assiale
P poligonale
PNA asse neutro plastico
Q punto del piano se con uno o due indici, se con tre o quattro indici valore di un integrale definito
R raggio esterno di lato circolare, punto della poligonale P’ giacente su s
S momento statico
V punto del piano appartenente alla poligonale P’
Z modulo plastico
W modulo di resistenza
(x,y) sistema di riferimento per una sezione
(X,Y) sistema di riferimento per una sezione composta
(u,v) sistema di riferimento principale per una sezione
(U,V) sistema di riferimento principale per una sezione composta
NOTE:
1 “L’acciaio nelle costruzioni”, Edizioni Cremonese, Roma, 1973
2 In alternativa alla introduzione di hi si potrebbe convenire di percorrere le poligonali piene in modo antiorario e le poligonali vuote in modo orario.
3 Si usano quattro indici quando al punto Qi si sostituisca il punto Qij, ovvero il punto j della poligonale i.
4 La parola “composta” si presta a qualche fraintendimento: in questo lavoro si intende “ottenuta assemblando sezioni elementari” (che al limite possono essere piatti come nelle sezioni composte saldate, ma anche IPE, angolari, UPN, altre sezioni “composte”, ecc.).
5 La dimostrazione è omessa per brevità. Si noti però che se Γ+ e Γ- sono il contorno della parte tesa e della parte compressa, rispettivamente, risulta
![]()
Γ+ e Γ- hanno in comune la parte di frontiera H che è una parte di s. H come parte di Γ- viene percorsa però con verso opposto di H come parte di Γ+, di modo che
![]()